Data Parallelism 数据并行(一)
Data Parallelism (DP)
数据并行(Data Parallelism, DP)可以分为以下三种形式:
这三种方法的共同思想是:将一个非常大的输入数据切分成若干份,并在多个 GPU 上并行完成前向传播和反向传播。
对于参数效率[1]极高的模型,数据并行尤为有效,比如 CNNs。
ShallowSpeed[2] 通过 python + MPI 实现了简单的数据并行。
Naive Data Parallelism
整体架构
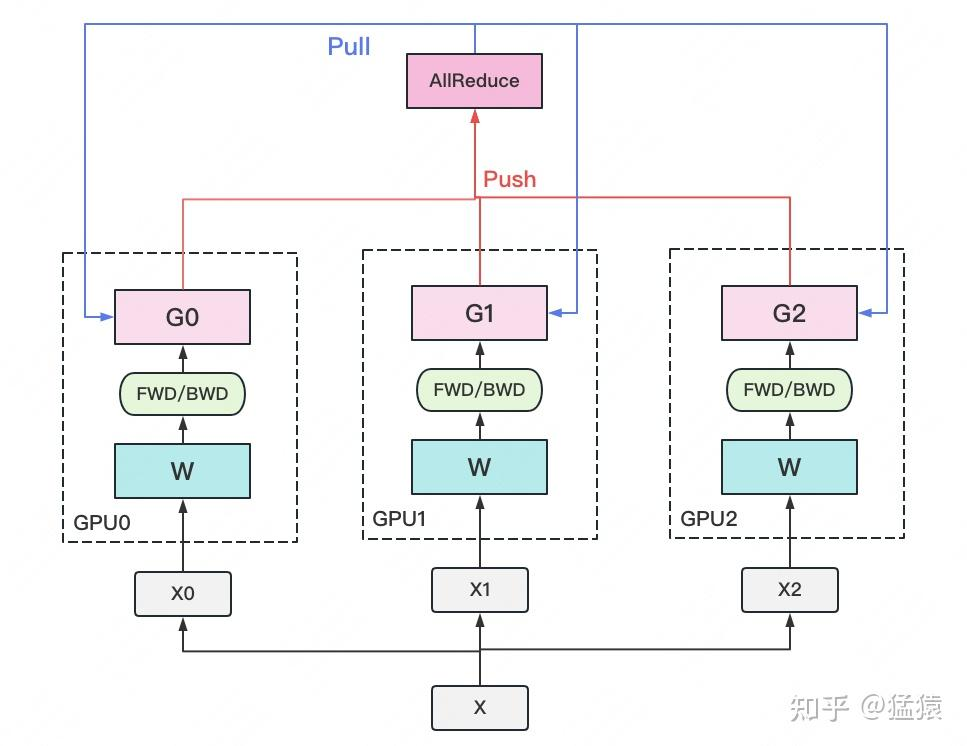
一个经典的数据并行流程如下:
- 有若干块用于计算的 GPU,例如图中的 GPU 0 ~ GPU 2。
- 还有 1 块用于梯度收集的 GPU,即执行 All-Reduce 的 GPU。
- 每块计算 GPU 上都会拷贝一份完整的模型参数。
- 将一份数据 $X$(例如一个 batch)均匀分配到不同的计算 GPU 上。
- 每块计算 GPU 完成一轮前向传播(FWD)和反向传播(BWD)后,得到各自的梯度 $G$。
- 每块计算 GPU 将自己的梯度发送到梯度收集 GPU,由其进行聚合。这里的聚合通常指梯度累加,当然也可以支持用户自定义逻辑。
- 梯度收集 GPU 完成聚合后,再将完整的梯度结果下发给各个计算 GPU,用于更新模型参数 $W$。更新完成后,各个计算 GPU 上的模型参数仍然保持一致。
- 这种“先聚合、再下发”的梯度通信过程,就称为 All-Reduce。
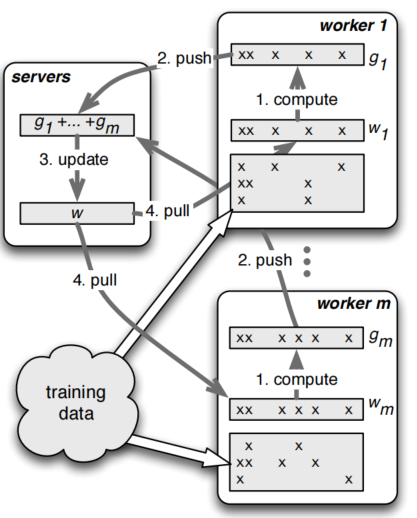
实现 DP 的一种经典编程框架叫做 参数服务器(Parameter Server)。在这个框架中:
- 计算 GPU 称为 Worker
- 梯度聚合 GPU 称为 Server
在实际应用中,为了尽量减少通信开销,通常会选择某一个 Worker 同时充当 Server。比如,可以把所有梯度都发送到 GPU 0 上进行聚合。这里还需要补充两点:
- 一个 Worker 或 Server 下可以包含不止 1 块 GPU。
- Server 不仅可以只做梯度聚合,也可以同时负责 梯度聚合 + 全量参数更新。下图展示了这种过程:
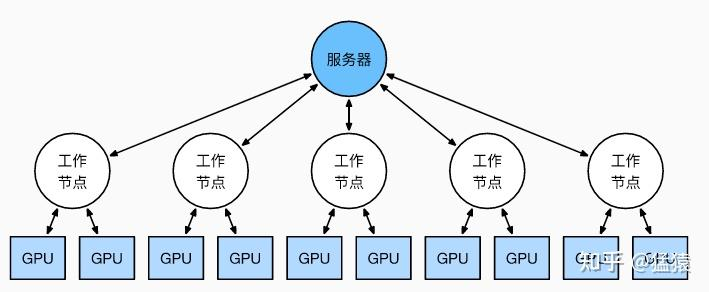
在参数服务器的语境下,DP 的流程也可以表示为下图所示的形式:
缺陷
Single Data Parallelism 的主要问题有三个:
- 存储开销大:每块 GPU 上都保存了一份完整模型,造成显存冗余。这个问题将在后文的 ZeRO 部分进一步优化。
- 通信开销大:Server 需要与每个 Worker 进行梯度传输。当 Server 和 Worker 不在同一台机器上时,Server 的带宽会成为整个系统的瓶颈。这个问题将在后文 DDP 部分说明。
- 同步开销大:当 Server 正在搬运数据、计算梯度时,Workers 往往处于空闲状态。为了解决这一问题,后来提出了梯度异步更新机制,可参考知乎和论文。本文不展开讨论。
Distributed Data Parallelism (DDP)
受通信负载不均衡的影响,简单的 DP 通常只适用于单机多卡场景。为了适配更通用的训练环境,DDP 被提出出来,它既支持多机,也支持单机。
DDP 首先要解决的是通信问题:将原本集中在 Server 上的通信压力,均匀分摊到各个 Worker 上。完成这一步之后,就可以进一步去掉 Server,仅保留 Worker。
在 Interconnect 一节中提到,Ring-All-Reduce 的通信时间仅为中心化节点方案的 $1/(k-1)$,其中 $k$ 是 GPU 数量。
前文提到,聚合梯度并下发梯度这一轮操作称为 All-Reduce。DDP 的核心就是使用 Ring-All-Reduce 来替代 DP 中中心化的梯度更新流程(或者连同参数更新一起替代),从而显著降低通信时间。
ZeRO Data Parallelism
存储分类
ZeRO 的本质,是在数据并行的基础上,对冗余空间进行深度优化。
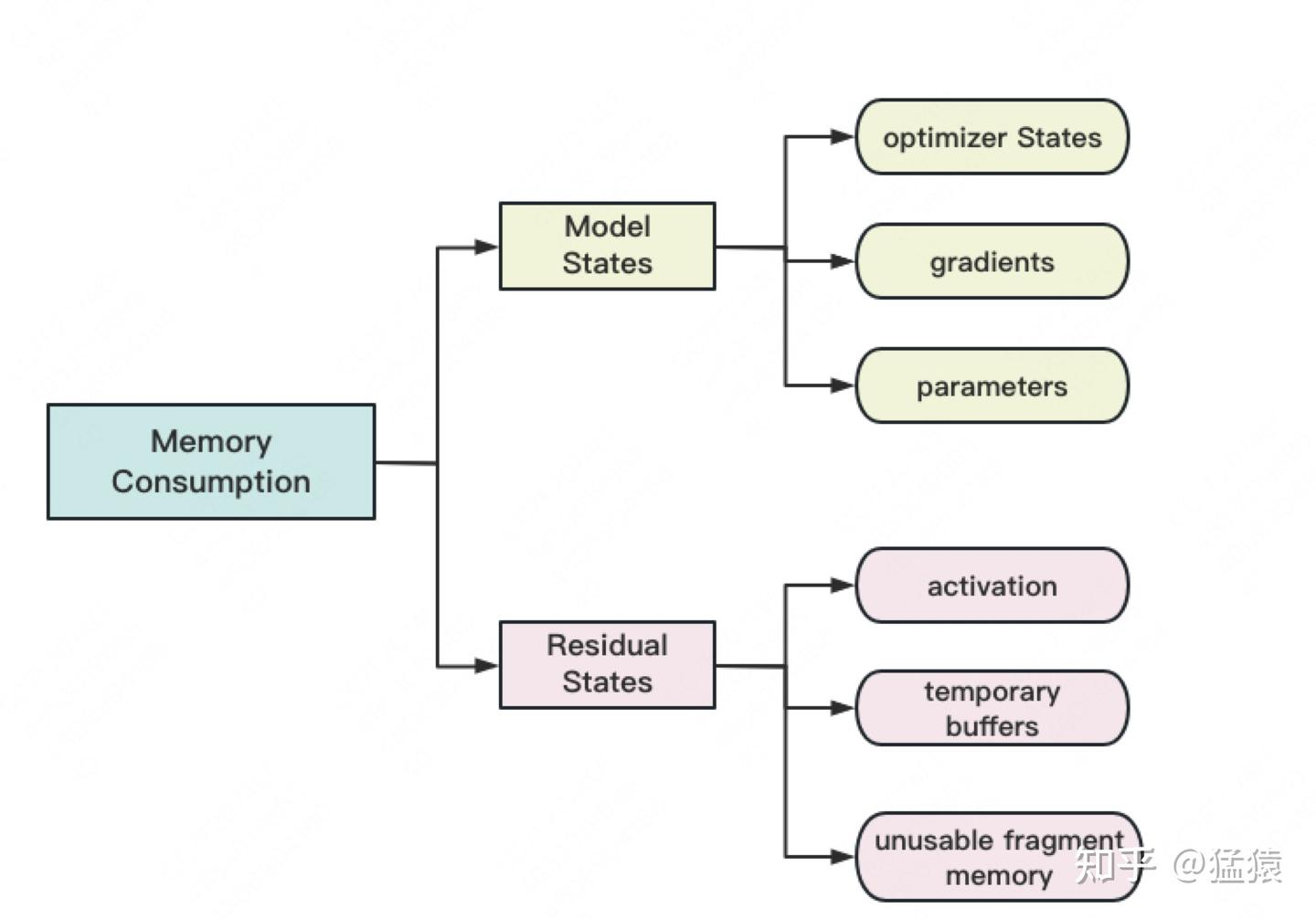
大模型训练中的显存占用可以分为两类:
-
Model States:与模型本身直接相关、必须保存的内容,包括:
- Optimizer States:优化器在进行梯度更新时所需要的数据。例如 Adam 需要额外保存状态信息,如梯度的一阶动量和二阶动量。
- Model Parameters:显存中的模型权重和偏置项。
- Gradients:反向传播过程中计算得到的梯度,用于更新模型参数。
-
Residual States:并非模型必须,但在训练过程中会额外产生的内容,包括:
- Activations:有了它可以更快地计算梯度,但它并不是必须长期保存的,因为可以通过重新执行 Forward Pass 来重算。
- Temporary Buffers:例如把梯度发送到某块 GPU 上进行聚合时产生的临时缓存。
- Unusable Fragment Memory:虽然总显存足够,但如果无法申请到连续的内存空间,相关请求也会失败。这类碎片化浪费可以通过内存整理来缓解。
混合精度训练
对于模型参数,我们通常希望尽可能精确,因此会使用 FP32(单精度浮点数,4 byte)来表示参数 $W$。但在 forward 和 backward 过程中,FP32 的计算开销也非常大。
因此,人们引入了 FP16 或 BF16(半精度浮点数,2 byte)来降低计算压力,这就形成了 混合精度训练。
其基本流程如下图所示:
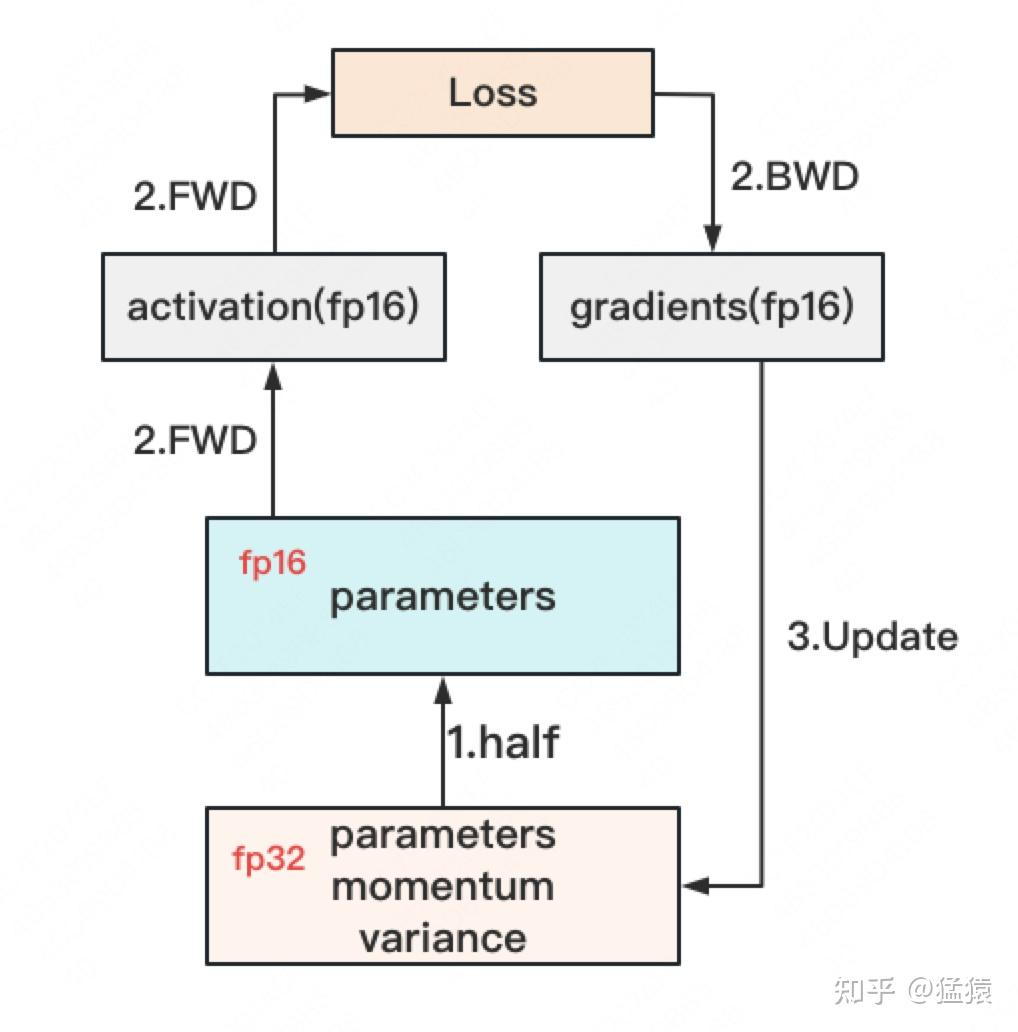
你可能会问:如果还要保留 FP32 的参数、Momentum 和 Variance,那为什么显存还能减少?
原因是:这些 FP32 状态通常会被 offload 到 CPU 内存中,只在需要时再加载到 GPU 上,因此 GPU 显存占用会明显降低。
ZeRO 的整体思路
在传统数据并行下,每个进程都会持有一份相同的模型参数和优化器状态,显存开销非常大。以混合精度场景下、参数量为 $\Psi$ 的模型和 Adam Optimizer 为例,Adam 需要保存:
- FP16 参数和梯度备份:分别占用 $2\Psi$ 和 $2\Psi$ 字节。
- FP32 参数、Momentum、Variance 备份:对应 3 份 $4\Psi$ 字节。
因此,总显存开销约为:
$$ 2\Psi + 2\Psi + 3 \times 4\Psi = 16\Psi \text{ Bytes} $$
也就是说,一个 7.5B 参数的模型,至少需要约 120GB 显存才能装下这些 Model States。
在数据并行场景下,这些重复的 Model States 会在 $N$ 个 GPU 上复制 $N$ 份,显存浪费非常明显。
ZeRO 则在数据并行的基础上,对冗余的 Model States 进行切分优化。使用 ZeRO 后,各个进程只保存完整状态的 $1/\text{GPUs}$,彼此之间不重叠,因此不再存在大量重复存储。
下面以 7.5B 参数模型为例,量化 ZeRO 各级别的内存优化效果。
ZeRO 的三个级别
相比传统数据并行中的简单复制,ZeRO 通过将模型的 参数(Parameters)、梯度(Gradients) 和 优化器状态(Optimizer States) 分散到不同进程中,消除冗余显存占用。
ZeRO 一共有三个级别,分别对应 Model States 不同程度的分割(Partition):
- ZeRO-1:分割 Optimizer States
- ZeRO-2:分割 Optimizer States 和 Gradients
- ZeRO-3:分割 Optimizer States、Gradients 和 Parameters

其中:
- $K$ 表示优化器状态占用的字节数,不同优化器对应的 $K$ 不同。
- $N_d$ 表示 GPU 数量。
ZeRO-1
在模型训练中,正向传播和反向传播并不会使用优化器状态,只有在梯度更新时,才会利用梯度和优化器状态计算新的参数。
因此,ZeRO-1 的核心思想是:让每个进程只保存一部分优化器状态,并在各自完成参数更新后,再将结果合并成完整模型。
假设有 $N_d$ 个并行进程,ZeRO-1 会将完整的优化器状态平均切分为 $N_d$ 份,分别存储在不同进程中。
当反向传播完成后,每个进程只对自己持有的那一部分优化器状态进行更新,包括 Momentum、Variance 以及 FP32 Master Parameters。
通过 ZeRO-1 对优化器状态进行分段存储,7.5B 参数模型的内存占用可以从原始数据并行下的 120GB 降到 31.4GB。
ZeRO-2
在第二阶段中,梯度也被拆分了。
通过 ZeRO-2 对梯度和优化器状态进行分段存储,7.5B 参数模型的内存占用可以进一步从 ZeRO-1 的 31.4GB 降到 16.6GB。
ZeRO-3
第三阶段进一步将 模型参数 也拆分掉。
在 ZeRO-3 中,模型的每一层都会被切片,每个进程只存储权重张量的一部分。在前向传播和反向传播过程中,各进程根据需要交换自己持有的部分参数,并计算激活值和梯度。
全过程展示
图解
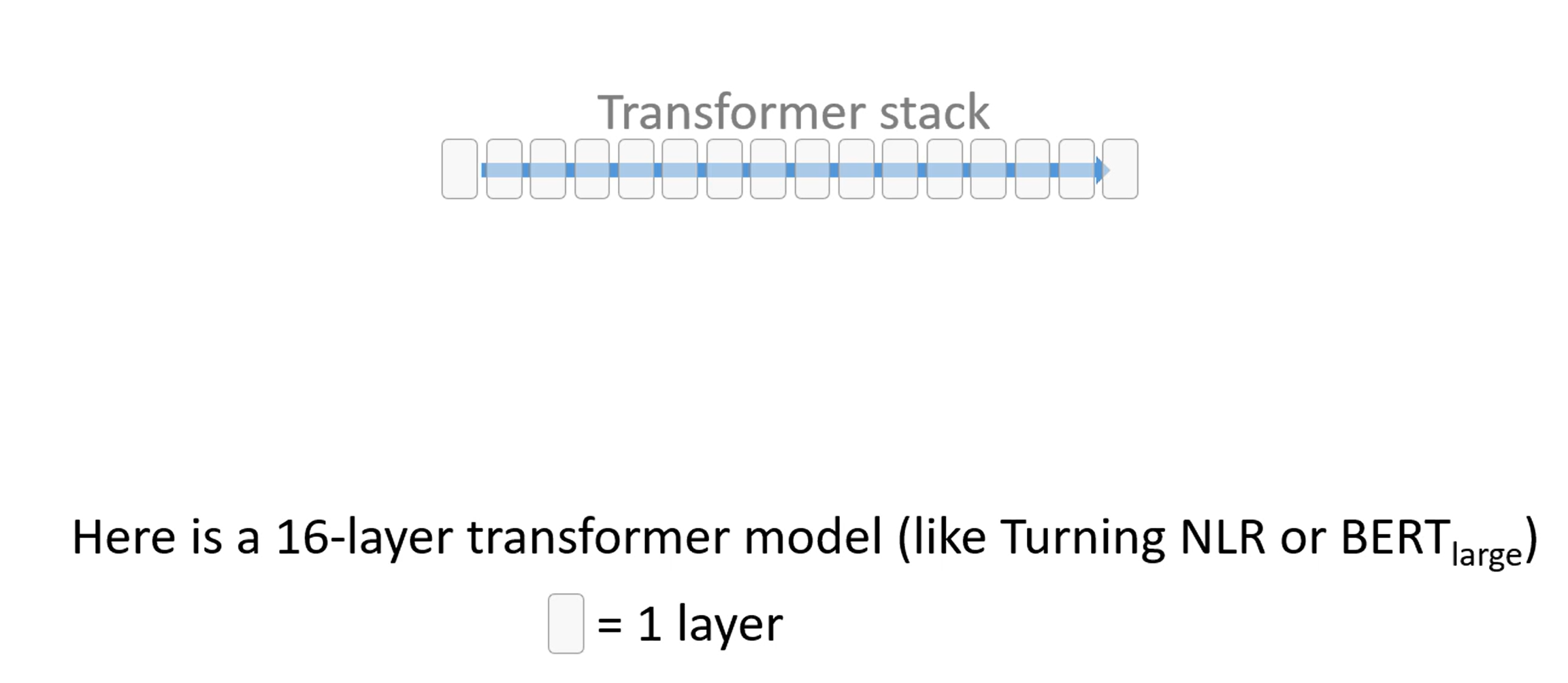
-
首先我们有一个 16 个 Transformer 块构成的模型,每一个块都是一个 Transformer 块。
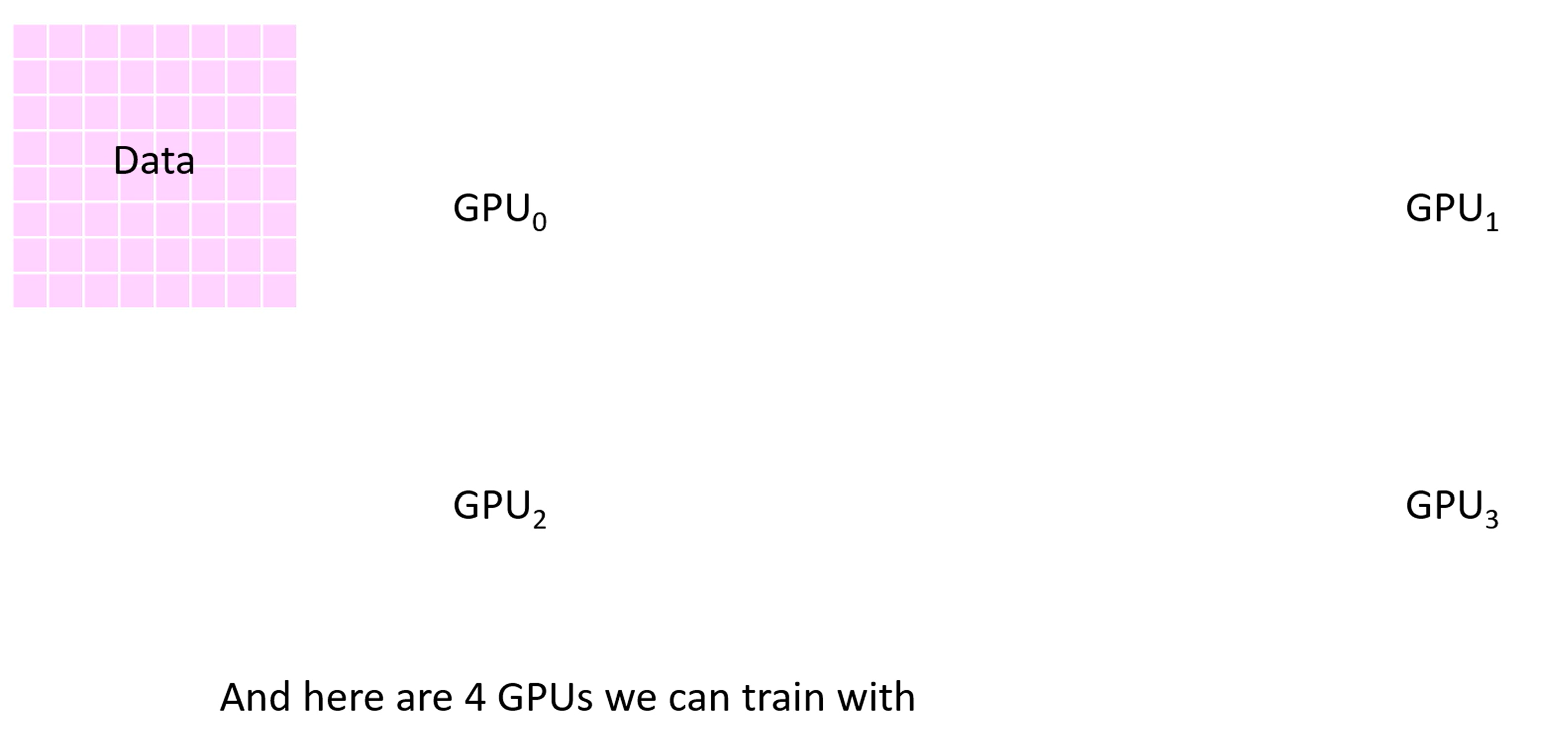
-
有一个很大的数据集和 4 个 GPU
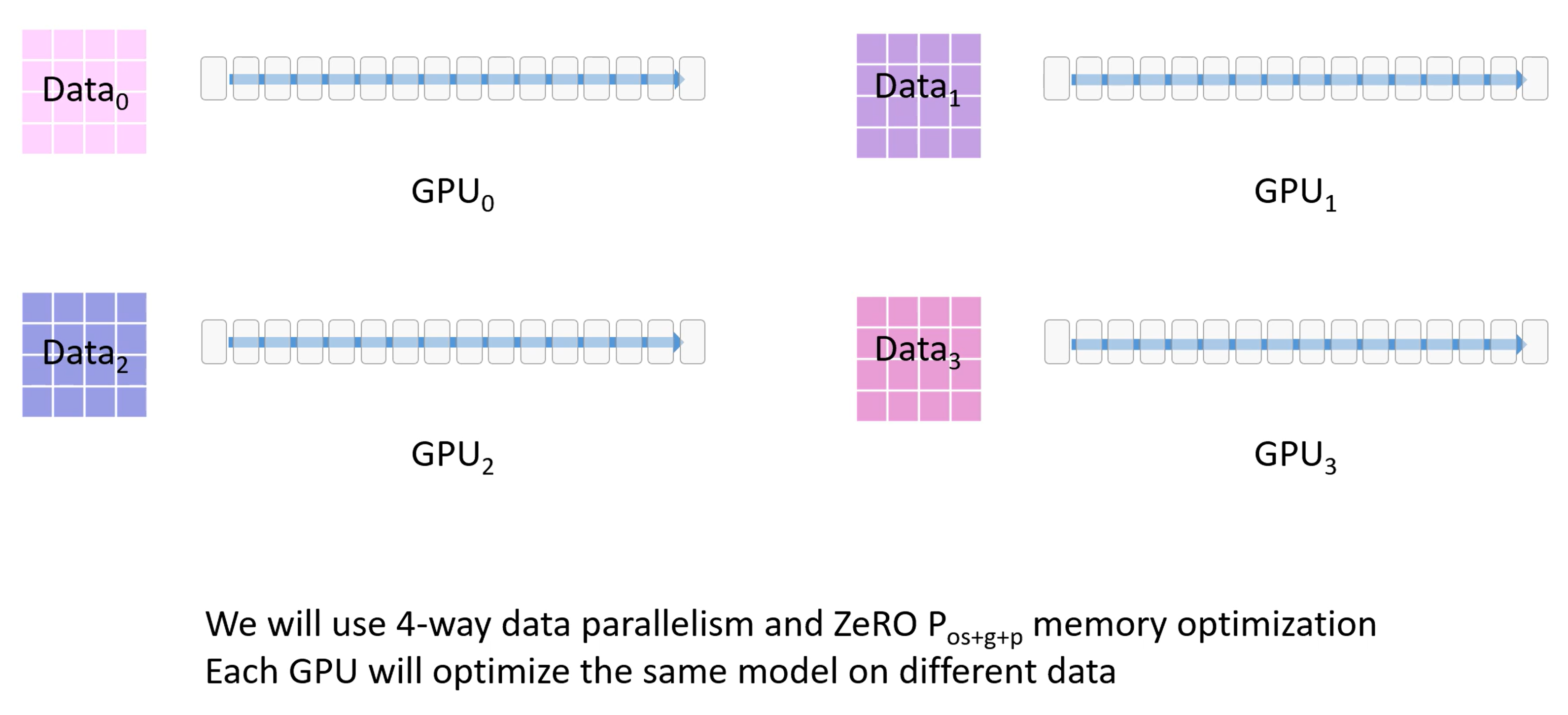
-
使用 3 -stage 策略,将 OPG 和数据都进行拆分放在 4 张卡上
-
每个模块下的格子代表模块占用的显存。
第一行是 FP16 版本的模型权重参数
第二行是 FP16 的梯度,用来反向传播时更新权重,
剩下的大部分绿色部分是优化器使用的显存部分,包含(FP32 梯度,FP32 方差,FP32 动量,FP32 参数),它只有在 FP16 梯度计算后才会被使用。
ZeRO 3 使用了混合精度,因此前向传播中使用了半精度的参数。
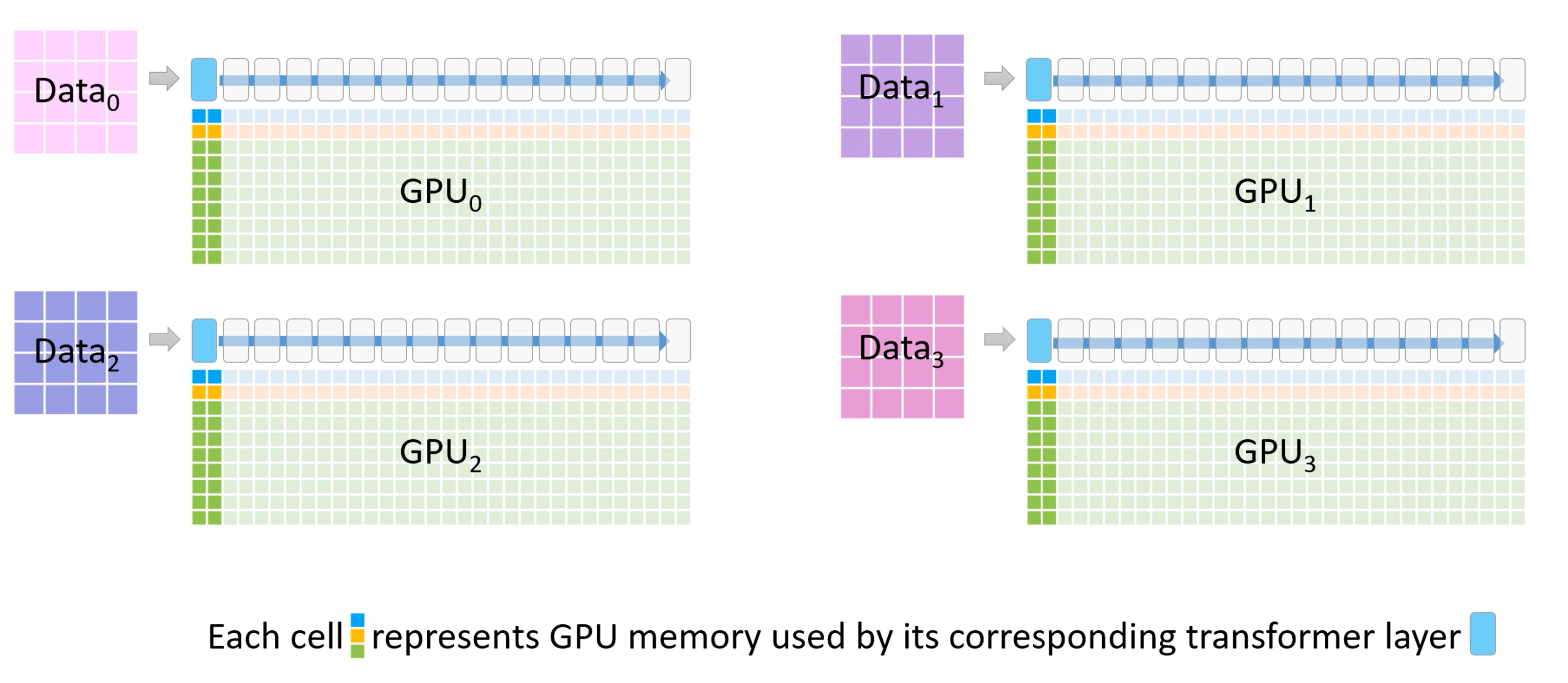
-
每个模块还需要一部分空间用于存放激活值,也就是上面蓝色的部分。
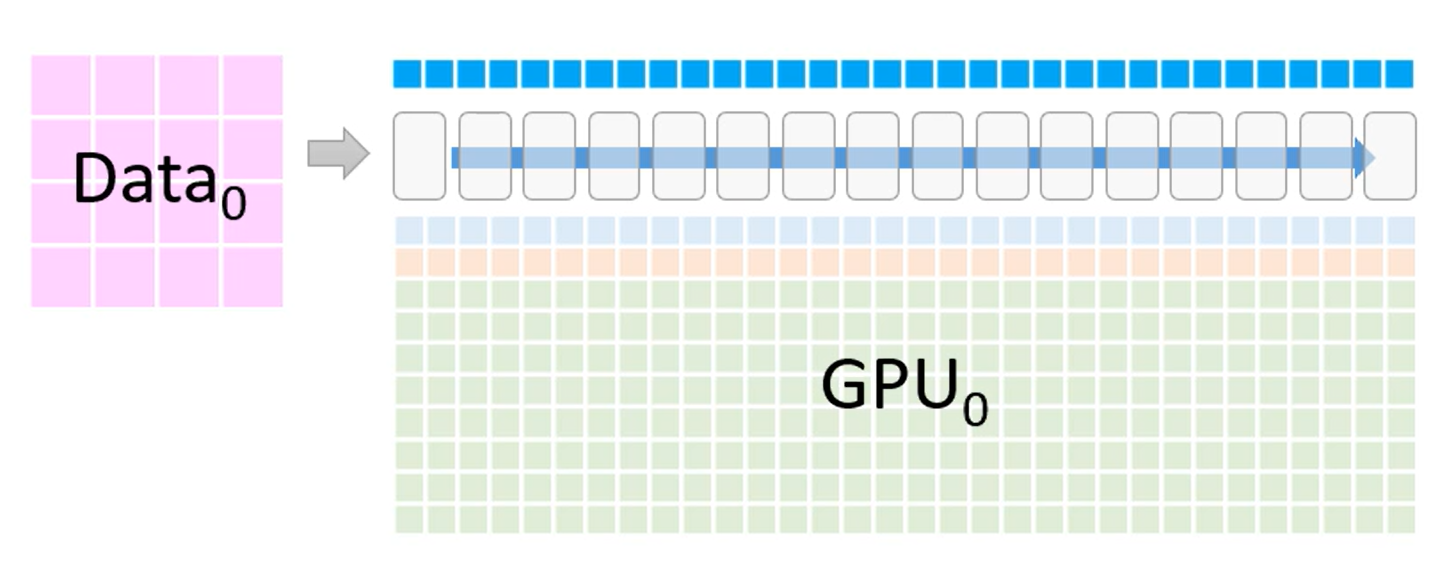
-
每个 GPU 都会负责模型的一部分,也就是图中的 $M_0 - M_3$
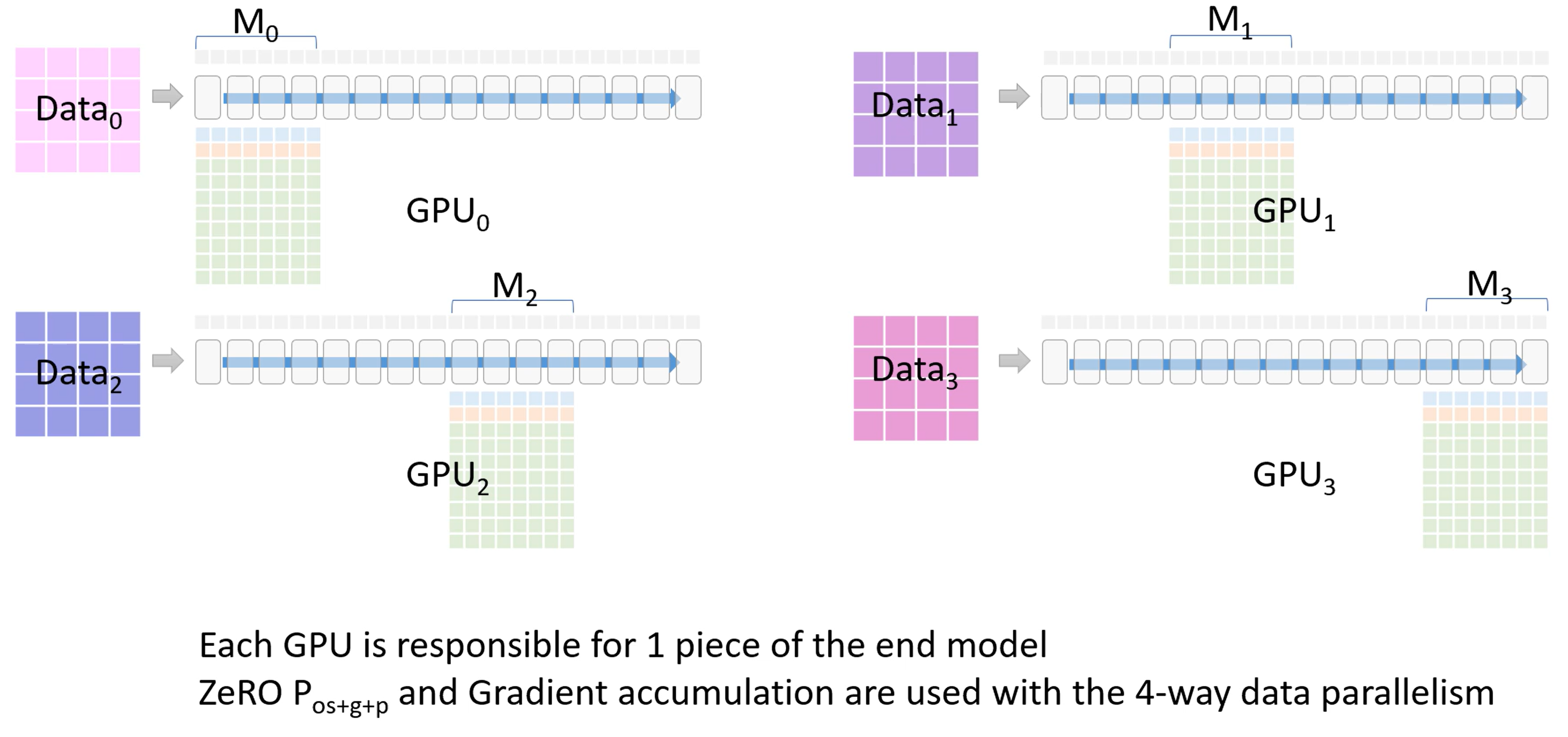
-
现在进入 ZeRO -3 的一个分布式训练流程:
- 首先,GPU_0 将自身已经有的模型部分权重 $M_0$ 通过 broadcast 发送到其他 GPU。
-
当所有 GPU 都有了权重 $W_0$ 后,除了 GPU_0 以外的 GPU 会将它们存储在一个临时缓存中
-
进行前向传播,每个 GPU 都会使用 $M_0$ 的参数在自己的进程的数据上进行前向传播,只有每个层的激活值会被保留
-
$M_0$ 计算完成后,其他 GPU 删除这部分的模型参数
-
接下来,GPU_1 将自己的模型权重 $M_1$ 广播发送到其他 GPU。所有 GPU 上使用 $M_1$ 进行前向传播
-
$M_1$ 计算完成后,其他 GPU 删除这部分的模型参数。
-
以此类推,将每个 GPU 上的各自的模型权重都训练完。
-
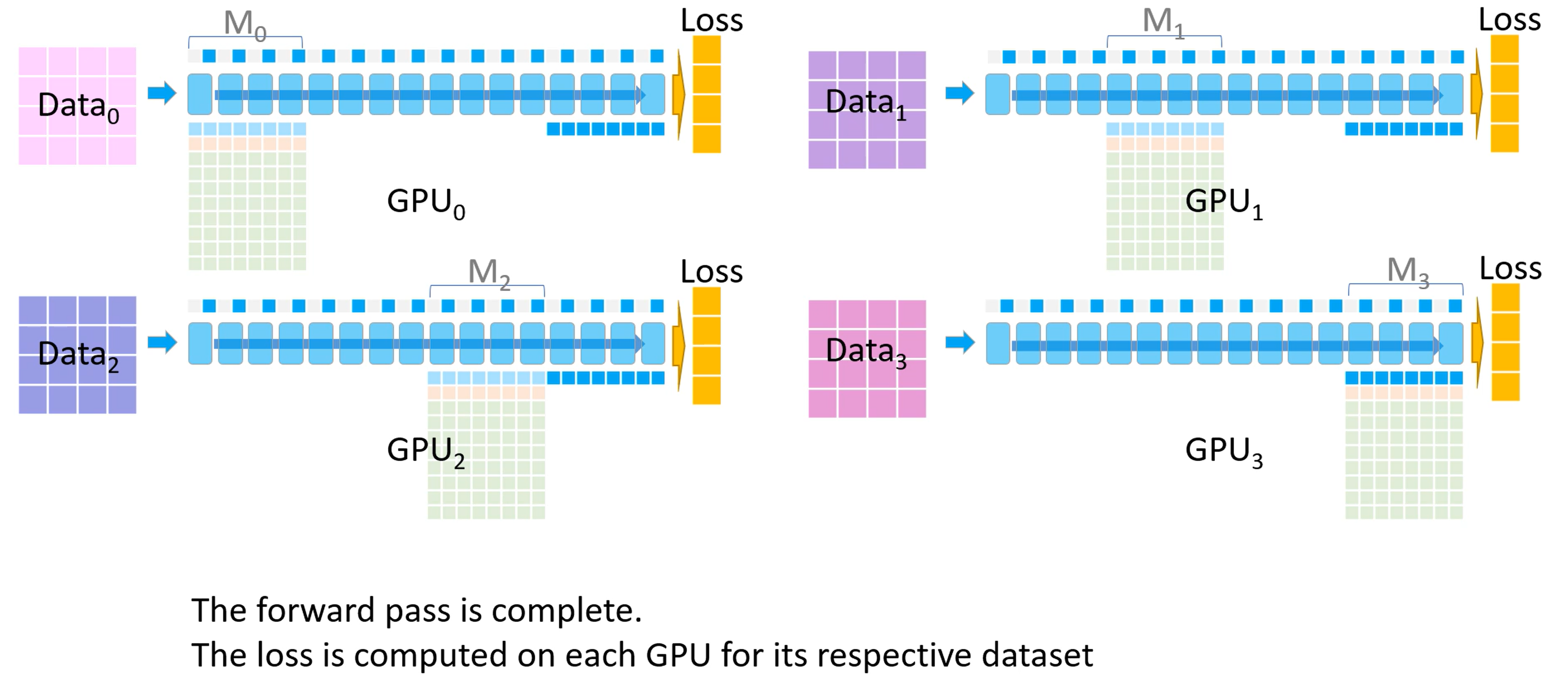
前向传播结束后,每个 GPU 都根据自己数据集计算一个损失
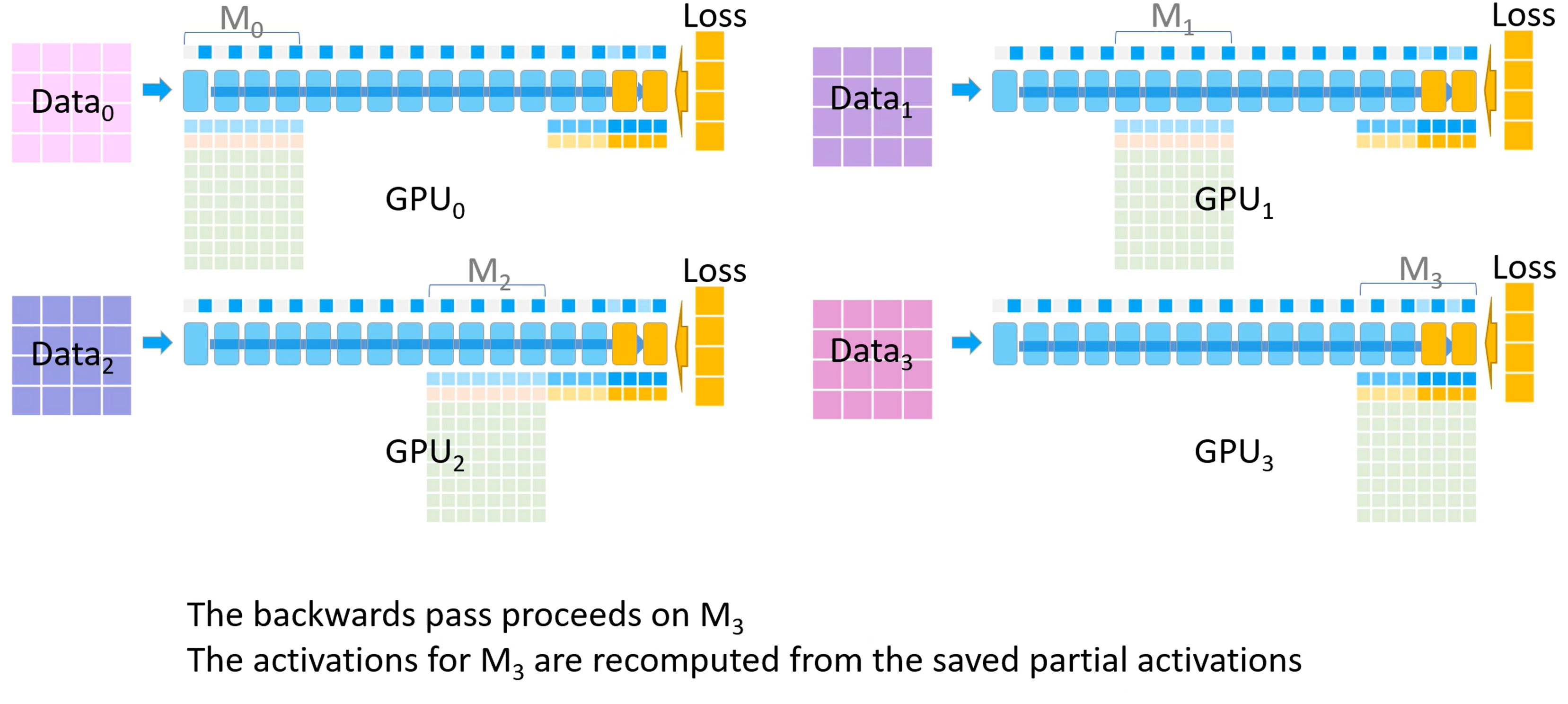
- 开始反向传播。首先所有 GPU 都会拿到最后一个模型分块(也就是 $M_3$ )的损失。反向传播会在这块模型上进行,$M_3$ 的激活值会从保存好的激活值上进行计算。
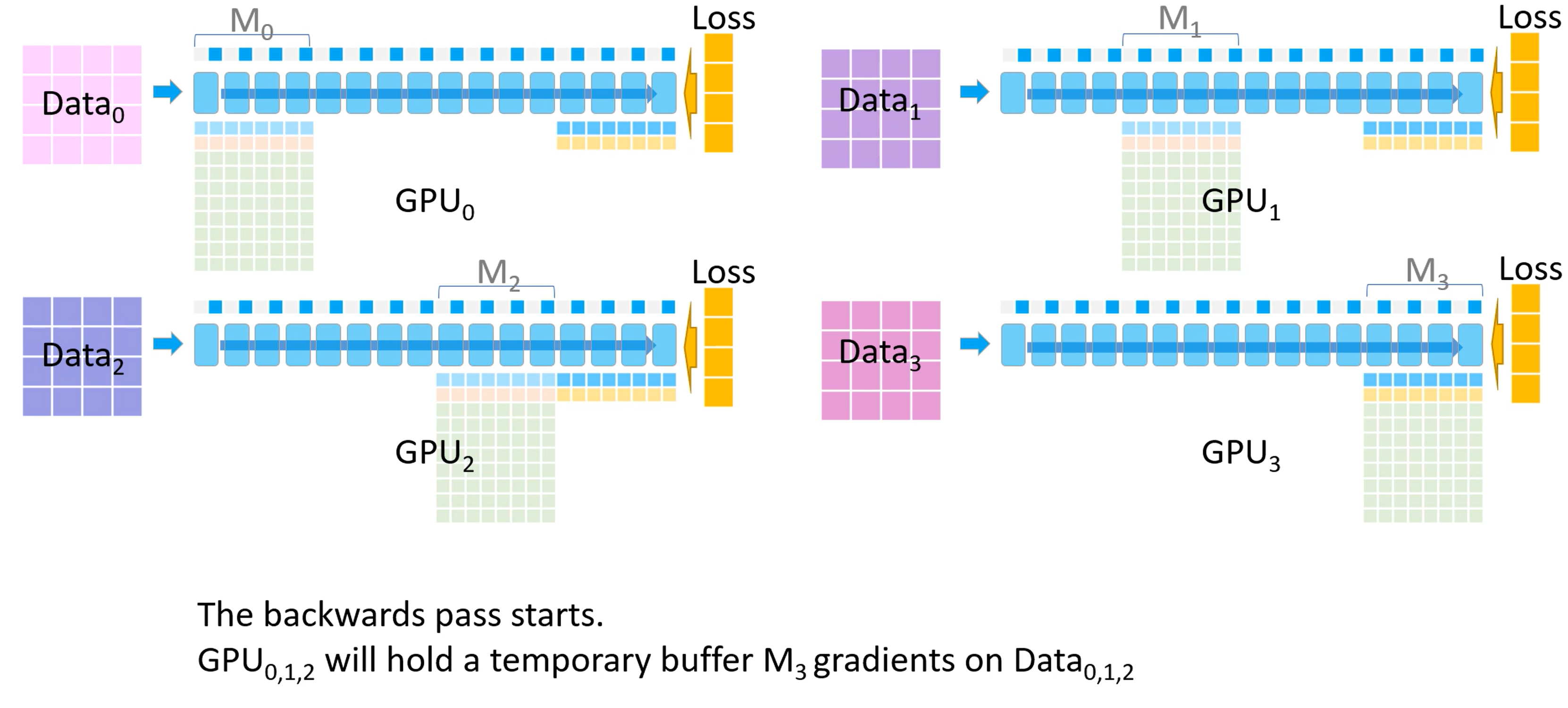
- 其他 GPU 将自己计算的 $M_3$ 的梯度发送给 GPU_3 进行梯度累积,最后在 GPU_3 上更新并保存最终的 $M_3$ 权重参数。
备注:梯度累积,将几个小批次的数据的梯度累积,累加够一个大批次后更新模型权重。
-
其他 GPU 删除临时存储的 $M_3$ 权重参数和梯度,所有 GPU 都删除 $M_3$ 的激活值
-
GPU_2 发送 $M_2$ 参数到其他 GPU,以便它们进行反向传播并计算梯度
-
以此类推,直到每个 GPU 上自己部分的模型参数更新完。
-
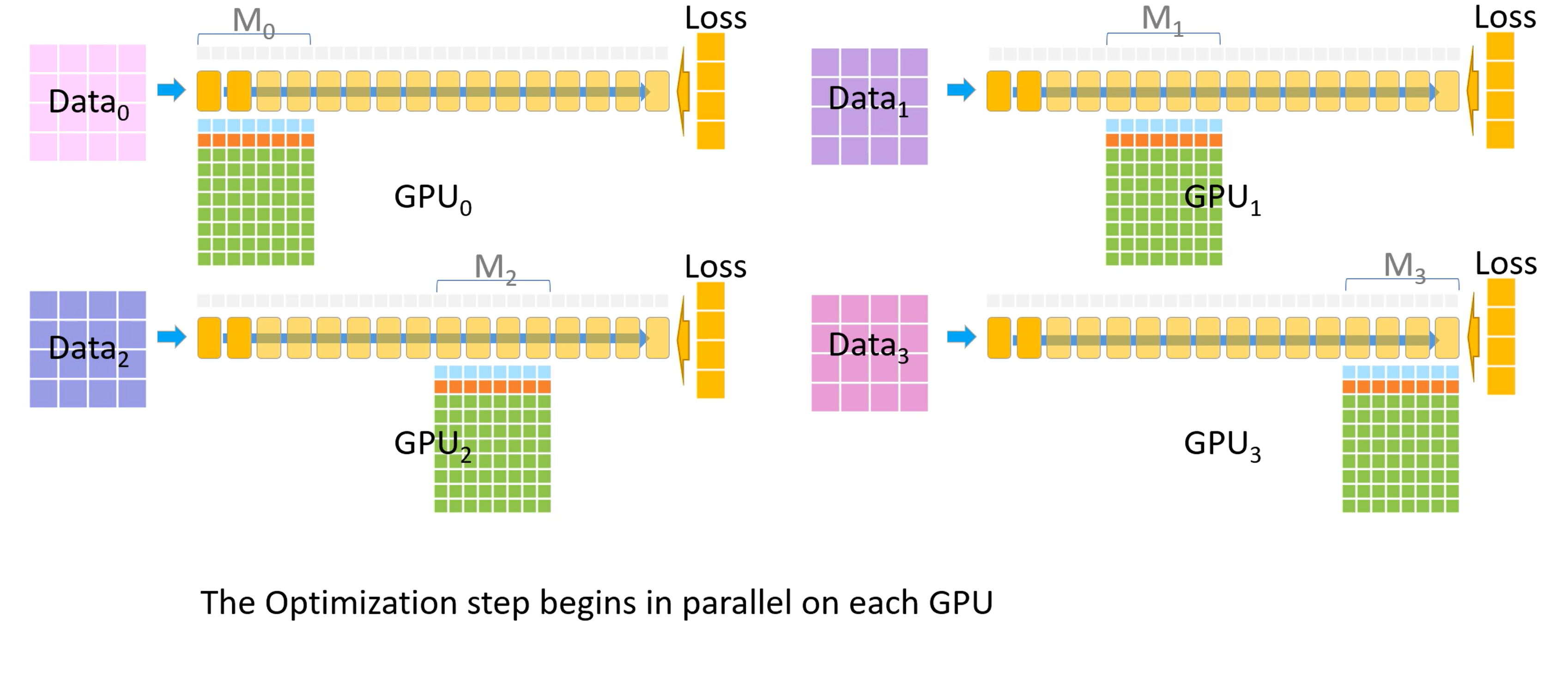
现在每个 GPU 都有自己的梯度了,开始计算参数更新
-
优化器部分在每个 GPU 上开始并行
- 优化器会生成 FP32 精度的模型权重,然后转换至 FP16 精度
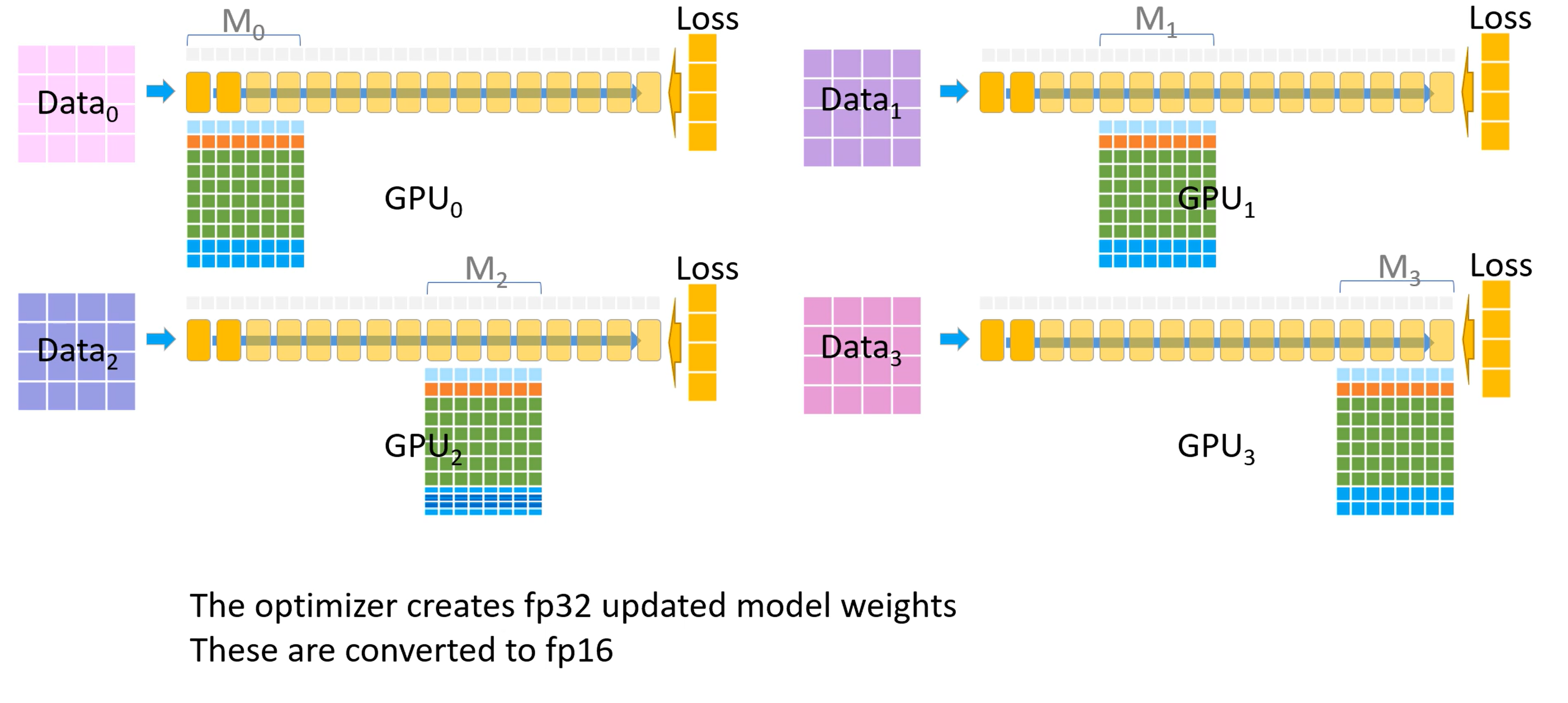
- FP16 精度的权重成为了下一个迭代开始时的模型参数,至此一个训练迭代完成
Comments