RoPE 旋转位置编码:从旋转矩阵到 LLaMA 源码实现
RoPE 还具备远程衰减和外推性,后面有需要再推导。
本文的推导过程与 RoFormer: Enhanced Transformer with Rotary Position Embedding 中的推导方式有所不同。原论文采用的是复平面展开的分析方法,而本文的推导思路更为直观易懂,主要参考了视频讲解 你还不懂旋转位置编码吗?。
Transformer 的 Self-Attention 机制本质上是对一组 token 做两两相关性计算。
给定一个长度为 $N$ 的输入序列:
$$
\mathbb{S}_{N}=\{w_i\}_{i=1}^{N}
$$
其中 $w_i$ 表示第 $i$ 个 token。
经过 embedding 层后,得到对应的词向量序列:
$$
\mathbb{E}_N = \{ \boldsymbol{x}_i \}_{i=1}^{N}
$$
其中 $\boldsymbol{x}_i \in \mathbb{R}^{d}$ 表示第 $i$ 个 token 的 $d$ 维词向量。
在 Self-Attention 中,每个 token 的 embedding 会被映射成 query、key、value:
$$
\boldsymbol{q}_m = f_q(\boldsymbol{x}_m, m)
$$
$$
\boldsymbol{k}_n = f_k(\boldsymbol{x}_n, n)
$$
$$
\boldsymbol{v}_n = f_v(\boldsymbol{x}_n, n)
$$
其中:
- $\boldsymbol{q}_m$:位置 $m$ 的 query;
- $\boldsymbol{k}_n$:位置 $n$ 的 key;
- $\boldsymbol{v}_n$:位置 $n$ 的 value;
- $m,n$ 表示 token 的位置。
Self-Attention 的核心计算是:
$$
a_{m,n} =
\frac{
\exp\left(
\frac{\boldsymbol{q}_m^T \boldsymbol{k}_n}{\sqrt{d}}
\right)
}{
\sum_{j=1}^{N}
\exp\left(
\frac{\boldsymbol{q}_m^T \boldsymbol{k}_j}{\sqrt{d}}
\right)
}
$$
$$
\boldsymbol{o}_m =
\sum_{n=1}^{N} a_{m,n}\boldsymbol{v}_n
$$
也就是说,attention score 主要由 $\boldsymbol{q}_m^T \boldsymbol{k}_n$ 决定。
但是,如果没有位置编码,那么 attention 只知道 token 的内容相似度,不知道 token 的顺序。
例如:
我 爱 你
你 爱 我
这两个句子的 token 集合类似,但语义不同。原因就在于 token 的顺序不同。
所以 Transformer 必须引入位置编码。
2. 绝对位置编码与相对位置编码
2.1 绝对位置编码
经典 Transformer 使用的是绝对位置编码。
常见做法是在 token embedding 上加一个位置向量:
$$
\boldsymbol{x}_i' = \boldsymbol{x}_i + \boldsymbol{p}_i
$$
然后再计算:
$$
\boldsymbol{q}_i = W_q(\boldsymbol{x}_i + \boldsymbol{p}_i)
$$
$$
\boldsymbol{k}_i = W_k(\boldsymbol{x}_i + \boldsymbol{p}_i)
$$
$$
\boldsymbol{v}_i = W_v(\boldsymbol{x}_i + \boldsymbol{p}_i)
$$
经典 Sinusoidal 位置编码定义为:
$$
\boldsymbol{p}_{i,2t} =
\sin
\left(
\frac{i}{10000^{2t/d}}
\right)
$$
$$
\boldsymbol{p}_{i,2t+1} =
\cos
\left(
\frac{i}{10000^{2t/d}}
\right)
$$
其中:
- $i$ 是 token 的位置;
- $d$ 是 embedding 维度;
- $t$:维度索引的分段参数,取值范围为 $ t = 0, 1, 2, \dots, (\frac{d}{2} - 1) $。
这种方法直接告诉模型“当前 token 在第几个位置”,所以称为绝对位置编码。
2.2 相对位置编码
在语言模型中,相对位置往往比绝对位置更重要。
例如:
位置 5 和位置 6
位置 100 和位置 101
它们的绝对位置不同,但相对距离都是:$ 1 $
对于 attention 来说,query 和 key 之间的相对距离:
$$
m-n
$$
通常比它们各自的绝对位置 $m$、$n$ 更重要。
因此,相对位置编码希望 attention score 显式或隐式依赖 $ m-n $
RoPE 的目标就是:
让 query 和 key 在计算点积时,自然包含相对位置信息 $m-n$。
3. RoPE 的核心思想
RoPE,全称 Rotary Position Embedding,即旋转位置编码。
它的核心思想是:
不把位置向量加到 embedding 上,而是根据 token 的位置,对 query 和 key 做旋转变换。
也就是说,对于位置 $m$ 的 query:
$$
\boldsymbol{q}_m
\rightarrow
R_m \boldsymbol{q}_m
$$
对于位置 $n$ 的 key:
$$
\boldsymbol{k}_n
\rightarrow
R_n \boldsymbol{k}_n
$$
然后再计算 attention score:
$$
(R_m\boldsymbol{q}_m)^T(R_n\boldsymbol{k}_n)
$$
经过旋转矩阵的性质变换后,这个点积会变成只与相对位置 $n-m$ 或 $m-n$ 有关的形式。
这就是 RoPE 最重要的性质。
4. 旋转矩阵基础
4.1 二维旋转矩阵
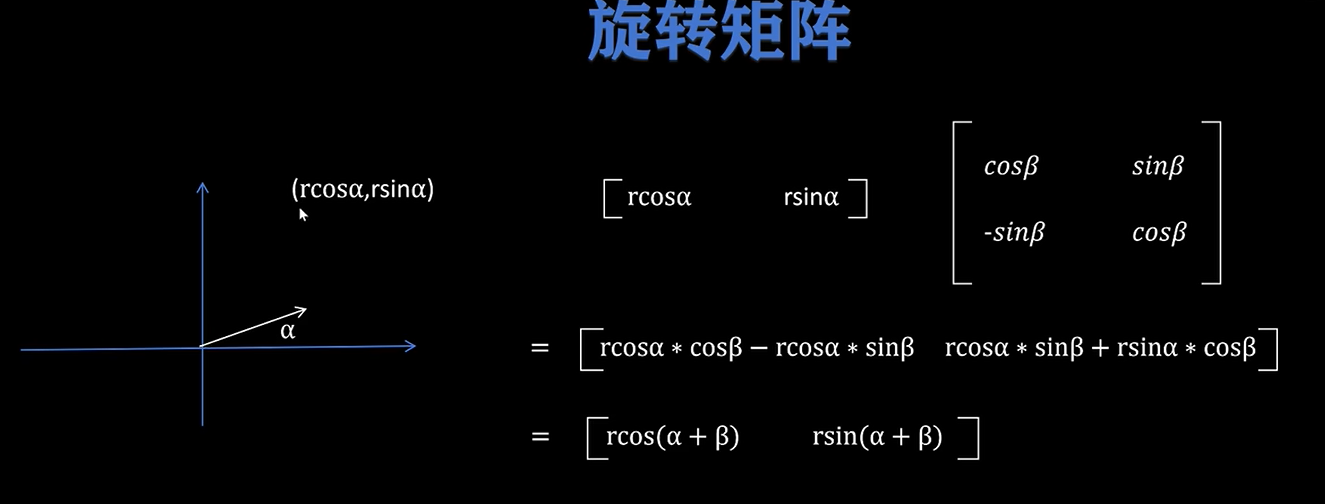
在二维平面中,一个向量绕原点旋转角度 $\theta$,可以用旋转矩阵表示。
常见的列向量旋转矩阵为:
$$
R(\theta) =
\begin{bmatrix}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{bmatrix}
$$
如果有二维列向量:
$$
\boldsymbol{x} =
\begin{bmatrix}
x_0 \\
x_1
\end{bmatrix}
$$
那么旋转后为:
$$
R(\theta)\boldsymbol{x}
=
\begin{bmatrix}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{bmatrix}
\begin{bmatrix}
x_0 \\
x_1
\end{bmatrix}
$$
展开得到:
$$
R(\theta)\boldsymbol{x}
=
\begin{bmatrix}
x_0\cos\theta - x_1\sin\theta \\
x_0\sin\theta + x_1\cos\theta
\end{bmatrix}
$$
下图展示了旋转矩阵的两个例子:

4.2 旋转矩阵的重要性质
旋转矩阵有两个非常关键的性质。
性质一:连续旋转可以相加
$$
R(\theta_1)R(\theta_2)=
R(\theta_1+\theta_2)
$$
也就是说,先旋转 $\theta_1$,再旋转 $\theta_2$,等价于一次性旋转 $ \theta_1+\theta_2 $。
性质二:转置等于反向旋转
$$
R(\theta)^T = R(-\theta)
$$
证明如下:
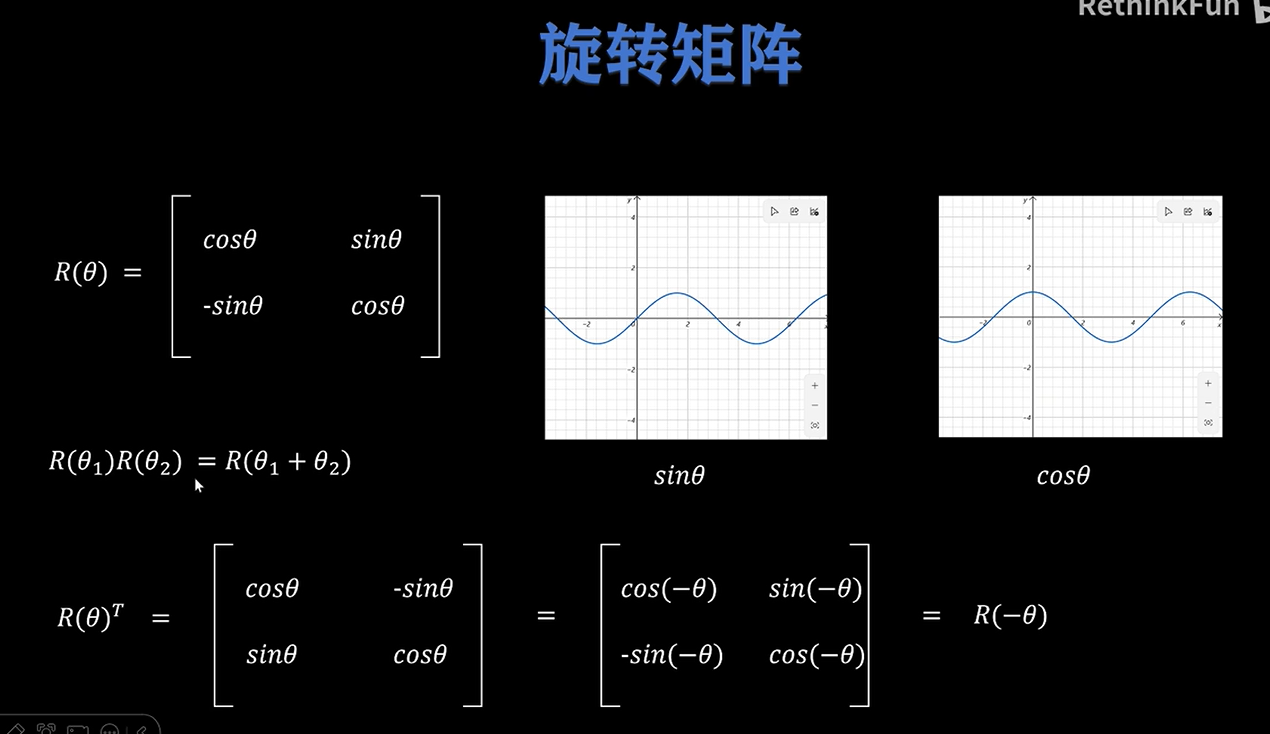
这两个性质是 RoPE 能够引入相对位置的数学基础。
5. 二维 RoPE 推导
为了理解 RoPE,可以先从二维情况开始。
假设 query 和 key 都是二维向量:
$$
\boldsymbol{q}_m =
\begin{bmatrix}
q_m^{(1)} \\
q_m^{(2)}
\end{bmatrix}
$$
$$
\boldsymbol{k}_n =
\begin{bmatrix}
k_n^{(1)} \\
k_n^{(2)}
\end{bmatrix}
$$
RoPE 对位置 $m$ 的 query 做旋转:
$$
f_q(\boldsymbol{x}_m,m) =
R(m\theta)\boldsymbol{q}_m
$$
对位置 $n$ 的 key 做旋转:
$$
f_k(\boldsymbol{x}_n,n)
=
R(n\theta)\boldsymbol{k}_n
$$
其中 $ \theta $是旋转频率。
二维旋转后的 query 为:
$$
R(m\theta)\boldsymbol{q}_m
=
\begin{bmatrix}
\cos m\theta & -\sin m\theta \\
\sin m\theta & \cos m\theta
\end{bmatrix}
\begin{bmatrix}
q_m^{(1)} \\
q_m^{(2)}
\end{bmatrix}
$$
展开:
$$
=
\begin{bmatrix}
q_m^{(1)}\cos m\theta - q_m^{(2)}\sin m\theta \\
q_m^{(1)}\sin m\theta + q_m^{(2)}\cos m\theta
\end{bmatrix}
$$
key 同理:
$$
R(n\theta)\boldsymbol{k}_n
=
\begin{bmatrix}
k_n^{(1)}\cos n\theta - k_n^{(2)}\sin n\theta \\
k_n^{(1)}\sin n\theta + k_n^{(2)}\cos n\theta
\end{bmatrix}
$$
这就是“旋转位置编码”名字的来源:
位置编码不是加法,而是对 query 和 key 进行旋转。
注意 m 和 n 都是对应 token 的位置 id。例如,第 0 个 token 的位置 id 即为 0。
6. 从二维 RoPE 扩展到多维 RoPE
真实模型中的 query 和 key 通常是高维向量。
假设 head dimension 为 $d$,并且 $d$ 是偶数:
$$
\boldsymbol{x}
=
[x_0,x_1,x_2,x_3,\cdots,x_{d-2},x_{d-1}]^T
$$
RoPE 的做法是每两个维度为一组,在每个二维子空间中做旋转。
RoPE 本质是在高维向量空间里选出若干个互不重叠的二维子空间,然后在每个二维子空间里做旋转。
所以,唯一的要求是,每组选择的那两个维度不能跟其他组的重复,除此之外怎么选都行。
比如,选择相邻的两个维度为一组,即:
- $(x_0, x_1)$ 使用频率 $\theta_0$
- $(x_2, x_3)$ 使用频率 $\theta_1$
- $(x_4, x_5)$ 使用频率 $\theta_2$
- ...
- $(x_{d-2}, x_{d-1})$ 使用频率 $\theta_{d/2-1}$
6.1 多维旋转矩阵
多维 RoPE 的旋转矩阵是一个块对角矩阵:
$$
R_{\Theta,m}^{d} =
\begin{bmatrix}
\cos m\theta_0 & -\sin m\theta_0 & 0 & 0 & \cdots & 0 & 0 \\
\sin m\theta_0 & \cos m\theta_0 & 0 & 0 & \cdots & 0 & 0 \\
0 & 0 & \cos m\theta_1 & -\sin m\theta_1 & \cdots & 0 & 0 \\
0 & 0 & \sin m\theta_1 & \cos m\theta_1 & \cdots & 0 & 0 \\
\vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots \\
0 & 0 & 0 & 0 & \cdots & \cos m\theta_{\frac d2-1} & -\sin m\theta_{\frac d2-1} \\
0 & 0 & 0 & 0 & \cdots & \sin m\theta_{\frac d2-1} & \cos m\theta_{\frac d2-1}
\end{bmatrix}
$$
其中频率集合为:
$$
\Theta
=
\left\{
\theta_i = 10000^{-2i/d},
i = 0,1,\cdots,\frac d2 - 1
\right\}
$$
也可以写成:
$$
\theta_i
=
\frac{1}{10000^{2i/d}}
$$
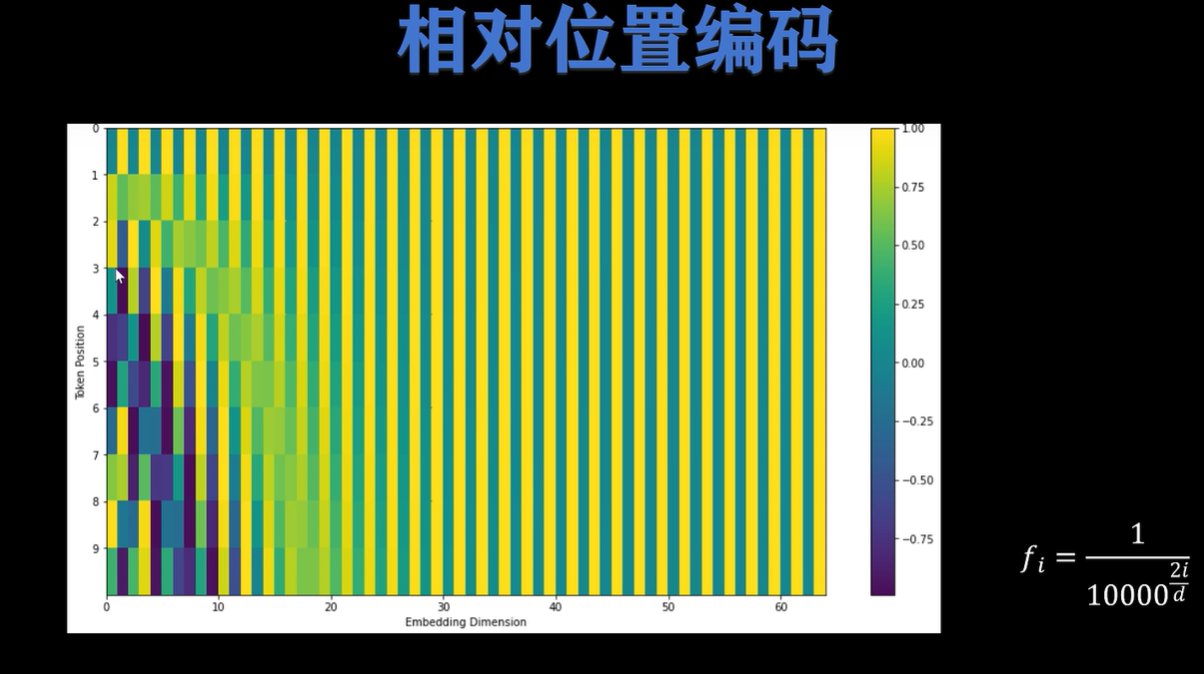
6.2 为什么不同维度使用不同频率?
RoPE 沿用了 Sinusoidal 位置编码中的频率设计:
$$
\theta_i
=
\frac{1}{10000^{2i/d}}
$$
不同维度(即 $i$)对应不同频率(即 $\theta$)。由于 $\sin$ 和 $\cos$ 都是周期性函数,所以:
- 低维频率较高,适合捕捉短距离位置变化。
- 高维频率较低,适合捕捉长距离位置变化。
这样可以让模型同时感知短程关系和长程关系。
7. RoPE 为什么天然包含相对位置信息
这是 RoPE 最核心的部分。
对于位置 $m$ 的 query:
$$
\tilde{\boldsymbol{q}}_m
=
R_m \boldsymbol{q}_m
$$
对于位置 $n$ 的 key:
$$
\tilde{\boldsymbol{k}}_n
=
R_n \boldsymbol{k}_n
$$
其中:
$$
R_m = R(m\theta)
$$
$$
R_n = R(n\theta)
$$
attention score 为:
$$
\tilde{\boldsymbol{q}}_m^T \tilde{\boldsymbol{k}}_n
=
(R_m\boldsymbol{q}_m)^T(R_n\boldsymbol{k}_n)
=
\boldsymbol{q}_m^T R_m^T R_n \boldsymbol{k}_n
$$
由于:
$$
R_m^T = R(-m\theta)
$$
所以:
$$
R_m^T R_n
=
R(-m\theta)R(n\theta)
$$
根据旋转矩阵相加性质:
$$
R(-m\theta)R(n\theta)
=
R((n-m)\theta)
$$
因此:
$$
\tilde{\boldsymbol{q}}_m^T \tilde{\boldsymbol{k}}_n
=
\boldsymbol{q}_m^T R((n-m)\theta)\boldsymbol{k}_n
$$
这说明 RoPE 之后的 attention score 只依赖相对位置 $n-m$,而不是单独依赖绝对位置 $m$ 和 $n$。所以 RoPE 虽然使用绝对位置生成旋转角度,但最终在 attention score 中体现为相对位置编码。
8. RoPE 的高效计算形式
如果直接构造完整的旋转矩阵:
$$
R_{\Theta,m}^{d}
$$
再和 query、key 相乘,计算量和内存开销都很大。
但 RoPE 的旋转矩阵是稀疏块对角矩阵,因此可以高效实现。
对于 head dimension 向量:
$$
\boldsymbol{x}
=
[x_0,x_1,x_2,x_3,\cdots,x_{d-2},x_{d-1}]^T
$$
如果选择相邻维度为一组,则 RoPE 旋转结果为:
$$
R_{\Theta,m}^{d}\boldsymbol{x}
=
\begin{bmatrix}
x_0\cos m\theta_0 - x_1\sin m\theta_0 \\
x_0\sin m\theta_0 + x_1\cos m\theta_0 \\
x_2\cos m\theta_1 - x_3\sin m\theta_1 \\
x_2\sin m\theta_1 + x_3\cos m\theta_1 \\
\vdots \\
x_{d-2}\cos m\theta_{\frac d2-1} - x_{d-1}\sin m\theta_{\frac d2-1} \\
x_{d-2}\sin m\theta_{\frac d2-1} + x_{d-1}\cos m\theta_{\frac d2-1}
\end{bmatrix}
$$
可以写成逐元素运算:
$$
R_{\Theta,m}^{d}\boldsymbol{x}
=
\boldsymbol{x}\odot \boldsymbol{\cos}_m
+
\operatorname{rotate}(\boldsymbol{x})\odot \boldsymbol{\sin}_m
$$
其中:
$$
\boldsymbol{\cos}_m
=
[
\cos m\theta_0,
\cos m\theta_0,
\cos m\theta_1,
\cos m\theta_1,
\cdots,
\cos m\theta_{\frac d2-1},
\cos m\theta_{\frac d2-1}
]
$$
$$
\boldsymbol{\sin}_m
=
[
\sin m\theta_0,
\sin m\theta_0,
\sin m\theta_1,
\sin m\theta_1,
\cdots,
\sin m\theta_{\frac d2-1},
\sin m\theta_{\frac d2-1}
]
$$
并且:
$$
\operatorname{rotate}(\boldsymbol{x})
=
[-x_1,x_0,-x_3,x_2,\cdots,-x_{d-1},x_{d-2}]
$$
这就是 RoPE 的高效实现形式。
9. HuggingFace LLama 的 RoPE 源码
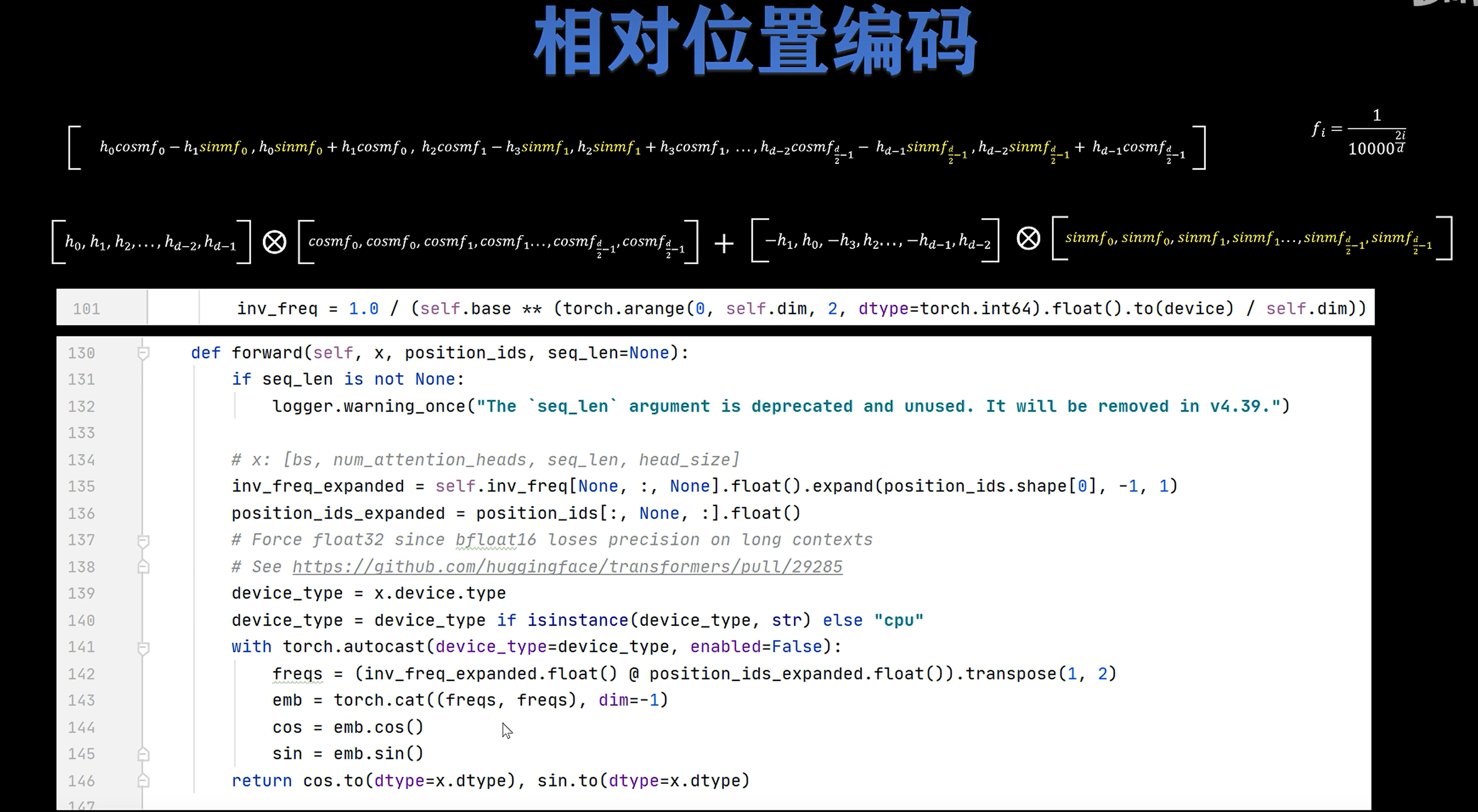
举例:
3 个 token
hidden 维度 = 10
为了方便理解,假设每个 token 的 q 向量就是 10 维。RoPE 实际上是作用在 attention 里的 q 和 k 上,不是直接作用在原始 token embedding 上。
现在有 3 个 token
位置分别是:
token0: position = 0
token1: position = 1
token2: position = 2
每个 token 的 hidden 向量是 10 维,例如某个 token 的 q 向量:
q = [h0, h1, h2, h3, h4, h5, h6, h7, h8, h9]
RoPE 要做的事是:
把这个 10 维向量拆成 5 个二维向量,然后根据 token 的位置旋转它们。
10 维怎么拆成 5 组?
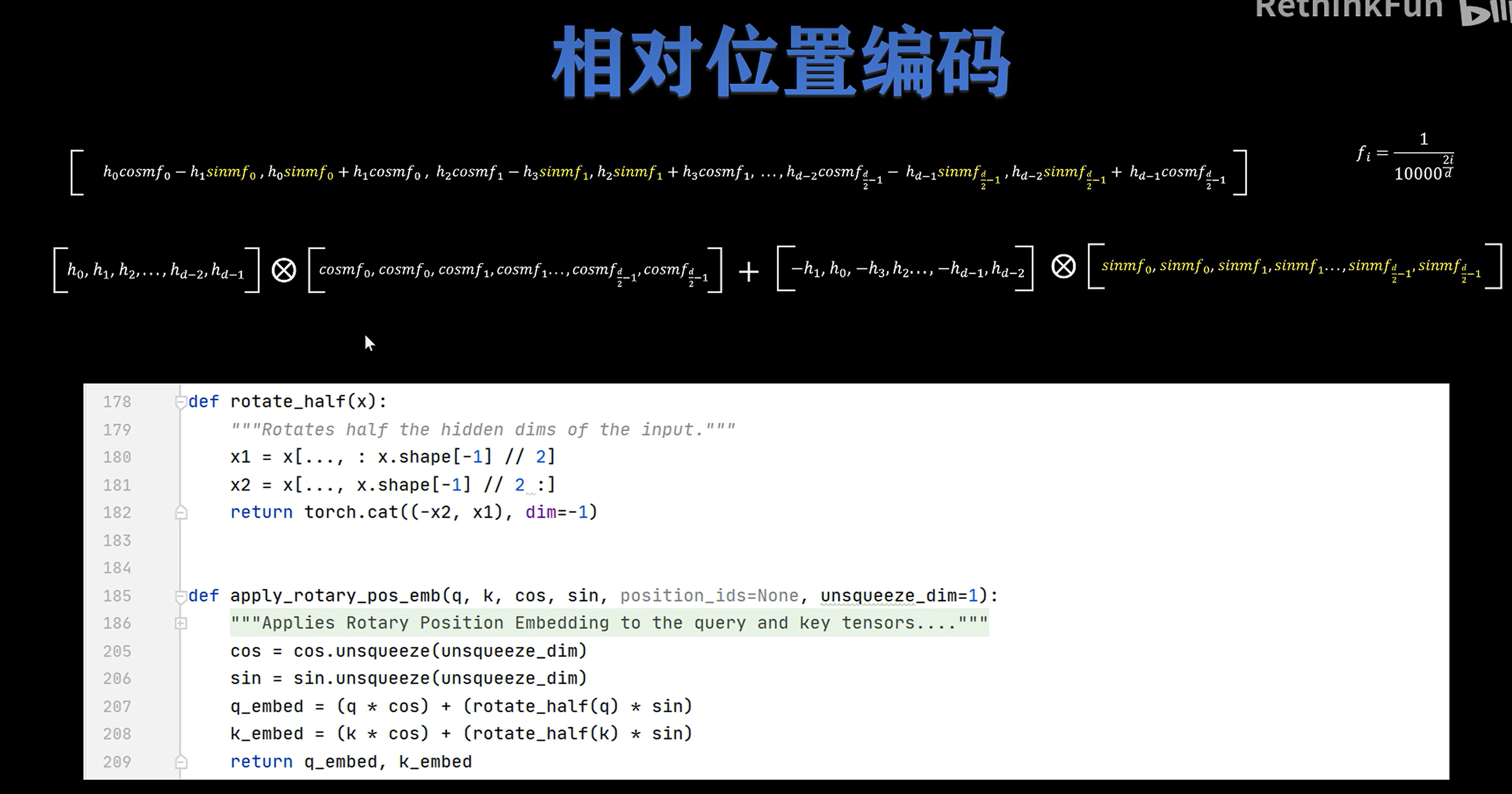
按照图里的代码:
x1 = x[..., : x.shape[-1] // 2]
x2 = x[..., x.shape[-1] // 2 :]
return torch.cat((-x2, x1), dim=-1)
10 维会被分成:
前半部分: [h0, h1, h2, h3, h4]
后半部分: [h5, h6, h7, h8, h9]
所以实际配对是:
(h0, h5)
(h1, h6)
(h2, h7)
(h3, h8)
(h4, h9)
每一对就是一个二维坐标点。
每一组有自己的旋转频率
hidden 维度是 10,所以一共有 5 组二维向量。
RoPE 会生成 5 个频率:
theta0 = 1 / 10000^(0/10) ≈ 1
theta1 = 1 / 10000^(2/10) ≈ 0.1585
theta2 = 1 / 10000^(4/10) ≈ 0.0251
theta3 = 1 / 10000^(6/10) ≈ 0.0040
theta4 = 1 / 10000^(8/10) ≈ 0.0006
也就是:
thetas ≈ [1, 0.1585, 0.0251, 0.0040, 0.0006]
这些频率对应 5 组二维向量。
不同位置产生不同旋转角度
旋转角度的计算方式是:
angle = position × theta
所以 3 个 token 的角度分别是:
token0,position = 0
angles0 = 0 × thetas
= [0, 0, 0, 0, 0]
也就是说 token0 不旋转。
token1,position = 1
angles1 ≈ [1, 0.1585, 0.0251, 0.0040, 0.0006]
token2,position = 2
angles2 ≈ [2, 0.3170, 0.0502, 0.0080, 0.0012]
所以:
位置越靠后,旋转角度越大。
评论