transformer 模型的 GPU 显存使用分析(一)
本文讲述 transformer 模型训练阶段的显存(VRAM)占用情况分析。主要参考 Transformer Math 101。
计算需求
训练一个 Transformer 模型的基本成本方程如下:
$$C \approx \tau T = 6PD$$
其中:
- $C$ 是训练 Transformer 模型所需的计算量,单位为总浮点运算次数
- $C = C_{\text{forward}} + C_{\text{backward}}$
- $C_{\text{forward}} \approx 2PD$
- $C_{\text{backward}} \approx 4PD$
- $\tau$ 是你的硬件设置的聚合吞吐量($\tau = (\text{GPU 数量}) \times (\text{每 GPU 实际 FLOPS})$),单位为 FLOPS
- $T$ 是训练模型所用的时间,单位为秒
- $P$ 是 Transformer 模型的参数数量
- $D$ 是数据集的大小,单位为 token
这些方程由 OpenAI 的缩放定律论文 和 DeepMind 的缩放定律论文 提出并经过实验验证。更多信息请参阅各论文。
这里有必要讨论一下 $C$ 的单位。$C$ 是总计算量的度量,可以用多种单位来衡量,例如:
- FLOP-秒,单位为 $\frac{\text{浮点运算次数}}{\text{秒}} \times \text{秒}$
- GPU-小时,单位为 $[\text{GPU 数量}] \times [\text{小时}]$
- 缩放定律论文通常以 PetaFLOP-天 为单位,即 $10^{15} \times 24 \times 3600$ 次总浮点运算
一个值得记住的有用区别是 实际 FLOPS 这一概念。虽然 GPU 加速器的白皮书通常会宣传它们的理论 FLOPS,但在实际中(尤其是在分布式环境下)这些数值从未被达到。在下面的“计算成本”部分中,会报告一些在分布式训练环境中常见的 实际 FLOPS 数值。
注意,我们使用的是成本方程的吞吐量-时间版本,这与这篇 关于大语言模型训练成本的精彩博文 中所用的版本一致。
参数与数据集的权衡
虽然严格来说,你可以用任意多的 token 来训练一个 Transformer 模型,但训练的 token 数量会显著影响计算成本和最终模型性能,因此找到合适的平衡点非常重要。
先来谈谈房间里的大象:“计算最优”的语言模型。 这类模型通常被称为“Chinchilla 缩放定律”[1],源于那篇论文中提出关于参数数量当前认知的模型系列。一个计算最优的语言模型,其参数数量 ($P$) 和 数据集大小 ($D$) 满足近似关系 $D = 20P$。这在一个非常特定的意义上是最优的:在使用 1000 块 GPU 训练 1 小时与使用 1 块 GPU 训练 1000 小时成本相同的资源环境下,如果你的目标是最大化性能同时最小化训练模型的 GPU 小时成本,那么你应该使用上述公式。
我们不建议在少于 2000 亿 token 的情况下训练大语言模型。 尽管对于许多模型而言这是“Chinchilla 最优”的,但由此得到的模型通常质量相当差。对于几乎所有应用,我们建议先确定你的用例可接受的推理成本,然后在你能够承受的推理成本范围内,训练尽可能大的模型,并使用尽可能多的 token。
计算成本的工程要点
Transformer 的计算成本通常以 GPU 小时或 FLOP 秒为单位列出。
- GPT-NeoX 在普通注意力机制下达到 150 TFLOP/s/A100,在使用 Flash Attention 时达到 180 TFLOP/s/A100。这与其它大规模高度优化的库(例如 Megatron-DS 报告的 137 到 163 TFLOP/s/A100)水平相当。
- 作为一般经验法则,你应该始终能够达到大约 120 TFLOP/s/A100。如果你看到的数值低于 115 TFLOP/s/A100,那么你的模型或硬件配置可能存在问题。
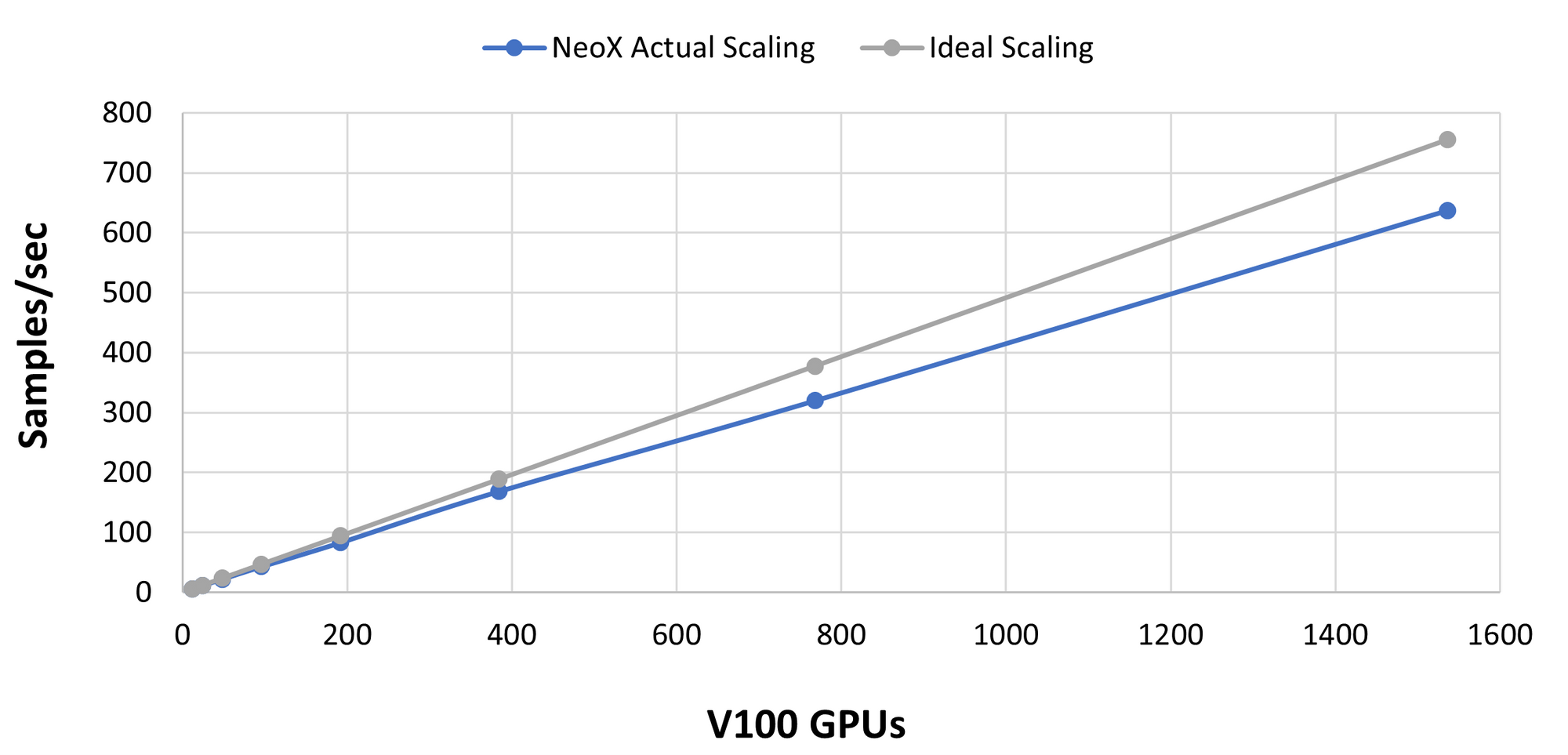
- 使用高质量的互连(如 InfiniBand)时,你可以在数据并行维度上实现线性或亚线性扩展(即增加数据并行度应使总吞吐量接近线性增长)。下图展示了在橡树岭国家实验室的 Summit 超算上测试 GPT-NeoX 库的结果。请注意,x 轴上是 V100,而文中大多数数值示例是针对 A100 的。
训练阶段的内存需求
Transformer 模型通常以其参数大小来描述。然而,在确定哪些模型可以适配到给定的计算资源上时,你需要知道模型将占用多少字节的空间。训练所需的内存总是比推理多,而且通常要多得多!
模型参数
首先,模型可以以纯 fp32 或 fp16 格式进行训练:
- 纯 fp32:$memory_{\text{model}} = (4\ \text{字节/参数}) \times (\text{参数数量})$
- 纯 fp16:$memory_{\text{model}} = (2\ \text{字节/参数}) \times (\text{参数数量})$
除了推理中讨论的常见模型权重数据类型外,训练还引入了混合精度训练,例如 AMP。该技术旨在最大化 GPU 张量核心的吞吐量,同时保持收敛性。现代深度学习训练经常使用混合精度训练,原因是:1) fp32 训练稳定,但内存开销大,且无法利用 NVIDIA GPU 张量核心;2) fp16 训练稳定,但难以收敛。有关混合精度训练的更多信息,我们推荐阅读这本 由 tunib-ai 编写的 notebook。请注意,混合精度需要在内存中存储模型的 fp16/bf16 和 fp32 版本,因此需要:
- 混合精度(fp16/bf16 和 fp32):$memory_{\text{model}} = (2\ \text{字节/参数}) \times (\text{参数数量})$
再加上一个额外的 $(4\ \text{字节/参数}) \times (\text{参数数量})$ 大小的模型副本,这个副本将在我们的优化器状态中计算。
优化器状态
Adam 很神奇,但它的内存效率非常低。除了需要保存模型参数和梯度参数的副本外,你还需要额外保存三份梯度参数的副本。因此:
-
对于普通 AdamW:$memory_{\text{optimizer}} = (12\ \text{字节}/\text{参数}) \times (\text{参数数量})$
- 参数的 fp32 副本:$4\ \text{字节/参数}$
- 动量:$4\ \text{字节/参数}$
- 方差:$4\ \text{字节/参数}$
-
对于像 bitsandbytes 这样的 8 位优化器:$memory_{\text{optimizer}} = (6\ \text{字节}/\text{参数}) \times (\text{参数数量})$
- 参数的 fp32 副本:$4\ \text{字节/参数}$
- 动量:$1\ \text{字节/参数}$
- 方差:$1\ \text{字节/参数}$
-
对于带动量的 SGD 类优化器:$memory_{\text{optimizer}} = (8\ \text{字节}/\text{参数}) \times (\text{参数数量})$
- 参数的 fp32 副本:$4\ \text{字节/参数}$
- 动量:$4\ \text{字节/参数}$
梯度
梯度可以以 fp32 或 fp16 格式存储(注意,梯度的数据类型通常与模型的数据类型一致。因此,在 fp16 混合精度训练中,梯度也是以 fp16 存储的),它们对内存开销的贡献如下:
- 在 fp32 下,$memory_{\text{gradients}} = (4\ \text{字节}/\text{参数}) \times (\text{参数数量})$
- 在 fp16 下,$memory_{\text{gradients}} = (2\ \text{字节}/\text{参数}) \times (\text{参数数量})$
激活值与批量大小
在大语言模型训练中,现代 GPU 的瓶颈通常是内存,而不是 FLOPs。因此,激活值重计算/检查点是一种非常流行的技术,它用额外的计算成本来换取内存成本的降低。激活值重计算/检查点的原理是:重新计算某些层的激活值,而不是将其存储在 GPU 内存中。内存的减少量取决于我们在决定清除哪些层时的选择程度。Megatron 的选择性重计算方案如下图所示:
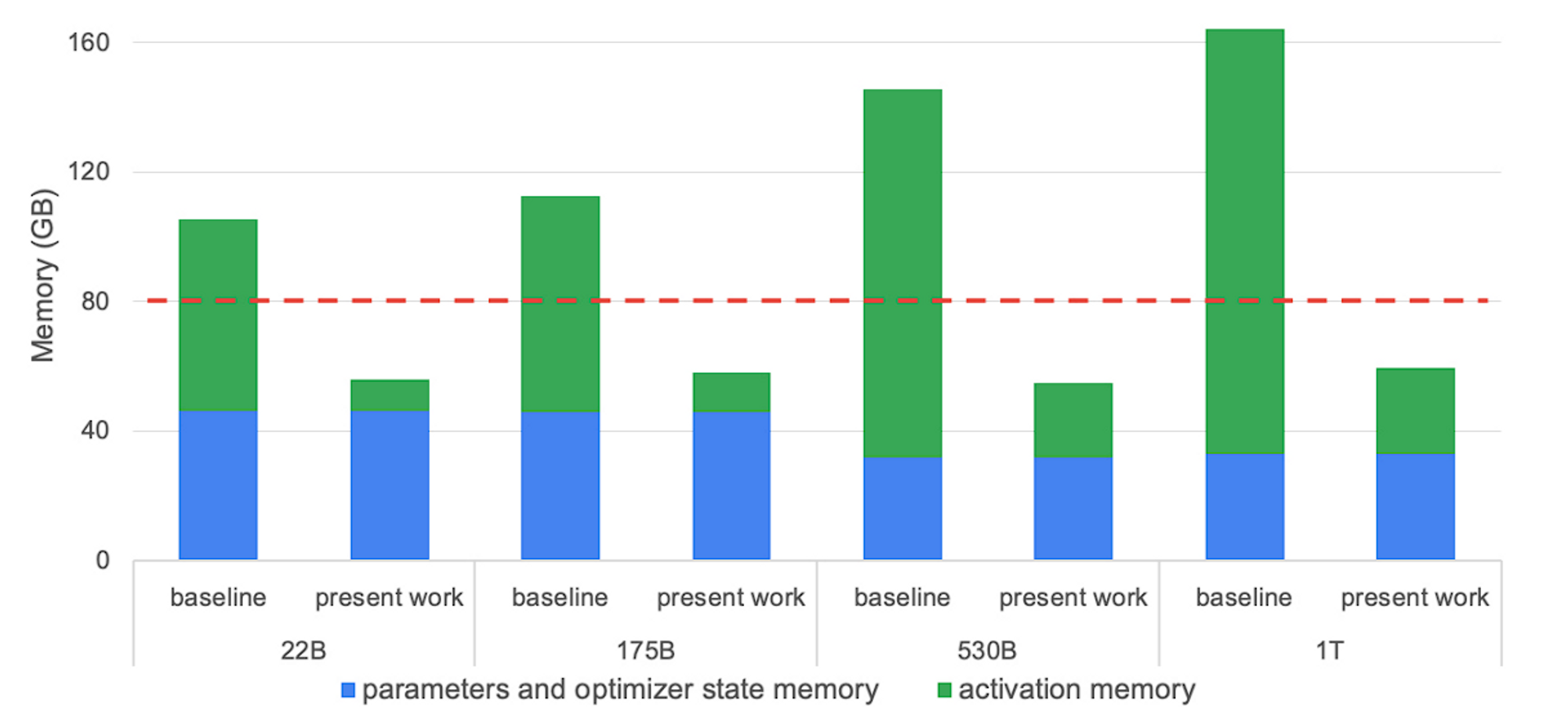
其中虚线红线表示 A100-80GB GPU 的内存容量,“present work”表示应用选择性激活重计算后的内存需求。详细信息以及下方公式的推导请参阅《Reducing Activation Recomputation in Large Transformer Models》。
存储 Transformer 模型激活值所需内存的基本公式如下:
$$ \text{memory}_{\text{No Recomputation activations}} = \text{sbh}L\left(10 + \frac{24}{t} + 5\frac{a \cdot s}{h \cdot t}\right) \text{ bytes} $$
$$ \text{memory}_{\text{Selective Recomputation activations}} = \text{sbh}L\left(10 + \frac{24}{t}\right) \text{ bytes} $$
$$ \text{memory}_{\text{Full Recomputation activations}} = 2 \cdot \text{sbhL} \text{ bytes} $$ [2]
其中:
- $s$ 是序列长度,以 token 为单位
- $b$ 是每块 GPU 的批量大小
- $h$ 是每个 Transformer 层中的隐藏层维度
- $L$ 是 Transformer 模型的层数
- $a$ 是 Transformer 模型中的注意力头数
- $t$ 是使用的张量并行度(如果不使用则为 1)
- 我们假设没有使用序列并行
- 我们假设激活值以 fp16 格式存储
所需的重计算额外开销也取决于方法的选择性,但其上限为一次完整的额外前向传播。因此,更新后的前向传播成本为:
$$ 2PD \leq C_{\text{forward}} \leq 4PD $$ [3]
总训练内存
因此,对于“这个模型能放进去训练吗”这个问题的一个良好启发式答案是:
分布式训练
分片优化器
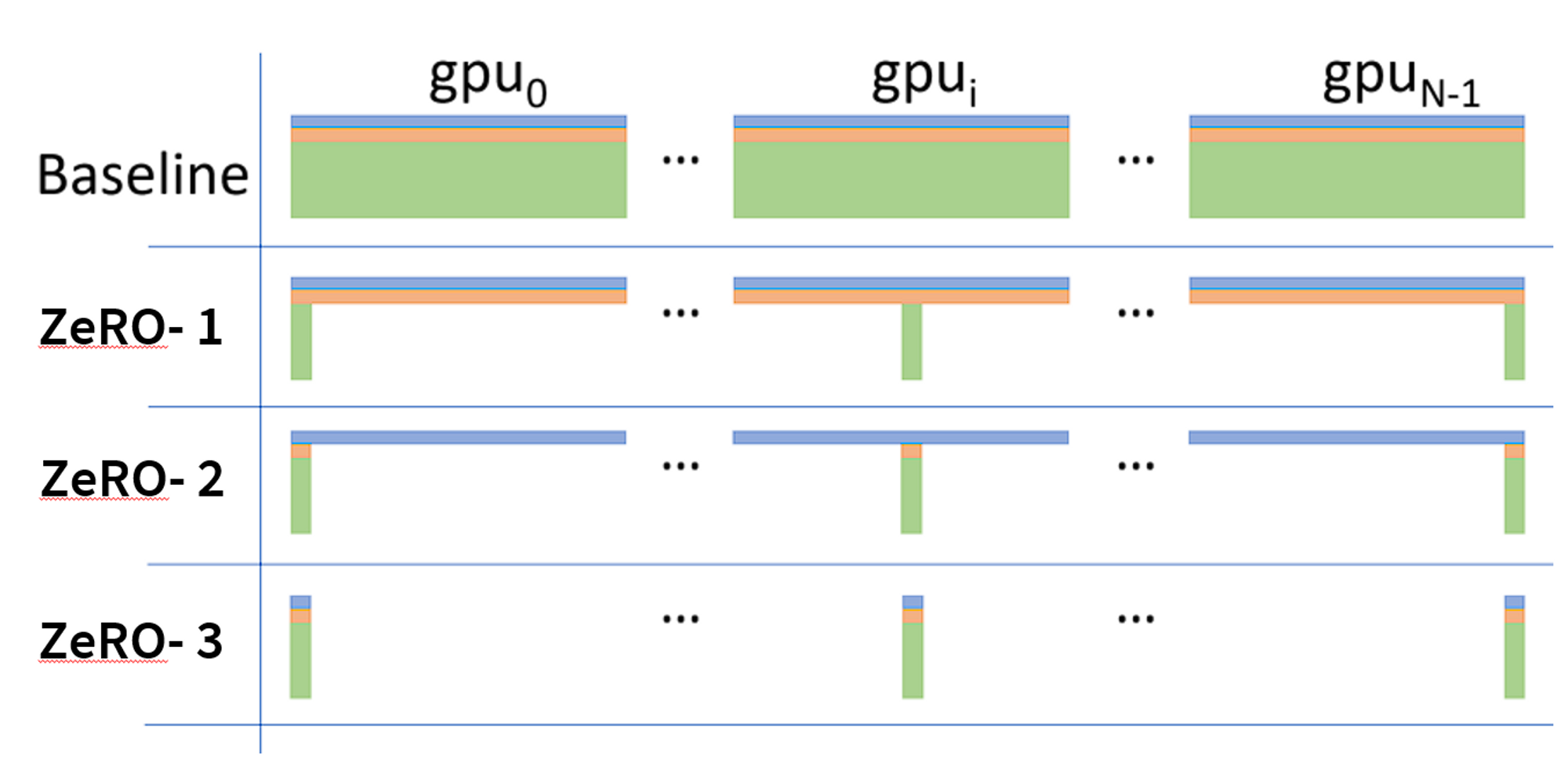
优化器巨大的内存开销是使用分片优化器(如 ZeRO 和 ESDP)的主要动机。这种分片策略可以将优化器开销降低到原来的 $\frac{1}{\text{GPU 数量}}$,这就是为什么某个模型配置在大规模集群上可以运行,但在小规模集群上却会出现内存不足(OOM)的原因。如果你想计算使用分片优化器训练所需的内存开销,你需要用到下图中给出的公式。关于分片优化的一些示例计算,请参见 ZeRO 论文中的下图(注意,$P_{os}$、$P_{os+g}$ 和 $P_{os+g+p}$ 通常分别称为 ZeRO-1、ZeRO-2、ZeRO-3。ZeRO-0 通常表示“禁用 ZeRO”):

按照这篇博文的术语(假设使用混合精度和 Adam 优化器):
-
对于 ZeRO-1:
$$ \text{Total Memory}_{\text{Training}} \approx \text{Model Memory} + \frac{\text{Optimizer Memory}}{\text{(GPU 数量)}} + \text{Activation Memory} + \text{Gradient Memory} $$ -
对于 ZeRO-2:
$$ \text{Total Memory}_{\text{Training}} \approx \text{Model Memory} + \text{Activation Memory} + \frac{\text{Optimizer Memory} + \text{Gradient Memory}}{\text{(GPU 数量)}} + $$ -
对于 ZeRO-3:
$$ \text{Total Memory}_{\text{Training}} \approx \text{Activation Memory} + \frac{\text{Model Memory} + \text{Optimizer Memory} + \text{Gradient Memory}}{\text{(GPU 数量)}} + (\text{ZeRO-3 存活参数}) $$
其中,数据并行度(DP Degree)在未使用流水线并行和/或张量并行时即为 GPU 数量。详细信息请参见分片优化器和3D 并行部分。
请注意,ZeRO-3 引入了一组“存活参数”。这是因为 ZeRO-3 提供了一系列配置选项(stage3_max_live_parameters、stage3_max_reuse_distance、stage3_prefetch_bucket_size、stage3_param_persistence_threshold),用于控制同一时刻 GPU 内存中保留的参数数量(取值越大,内存占用越多,但通信开销越小)。这些参数会对总 GPU 内存产生显著影响。
另外注意,ZeRO 还可以通过 ZeRO-R 在数据并行进程上对激活值进行分区。这会使上面的激活值内存项除以张量并行度 $t$。更多细节请阅读相关的 ZeRO 论文 和 配置选项(在 GPT-NeoX 中,对应的是 partition_activations 标志)。如果你正在训练一个超大模型,你可能希望用一些内存开销换取额外的通信成本,此时激活值会成为瓶颈。以下是将 ZeRO-R 与 ZeRO-1 结合使用的示例:
3D 并行
大语言模型的并行化主要有三种形式:
数据并行: 在模型的(可能已进行模型并行的)副本之间拆分数据。
流水线并行或张量/模型并行: 这些并行方案将模型的参数拆分到多个 GPU 上。这类方案需要大量的通信开销,但它们减少内存的效果近似为:
$$ \text{memory}_{\text{w/ parallelism model}} \approx \frac{\text{Model Memory}}{\text{Pipe-Parallel-Size} \times \text{Tensor-Parallel-Size}} $$
$$ \text{memory}_{\text{w/ parallelism gradients}} \approx \frac{\text{Gradient Memory}}{\text{Pipe-Parallel-Size}} $$ [4]
需要注意的是,这个方程是近似的,原因在于:(1) 流水线并行不会减少激活值的内存占用;(2) 流水线并行要求所有 GPU 存储所有正在执行的微批次的激活值,这对于大模型来说会变得非常显著;(3) GPU 需要临时存储并行方案所需的额外通信缓冲区。
分片优化器 + 3D 并行
3D 并行
当 ZeRO 与张量并行和/或流水线并行结合时,形成的并行策略会构成如下所示的网格结构:
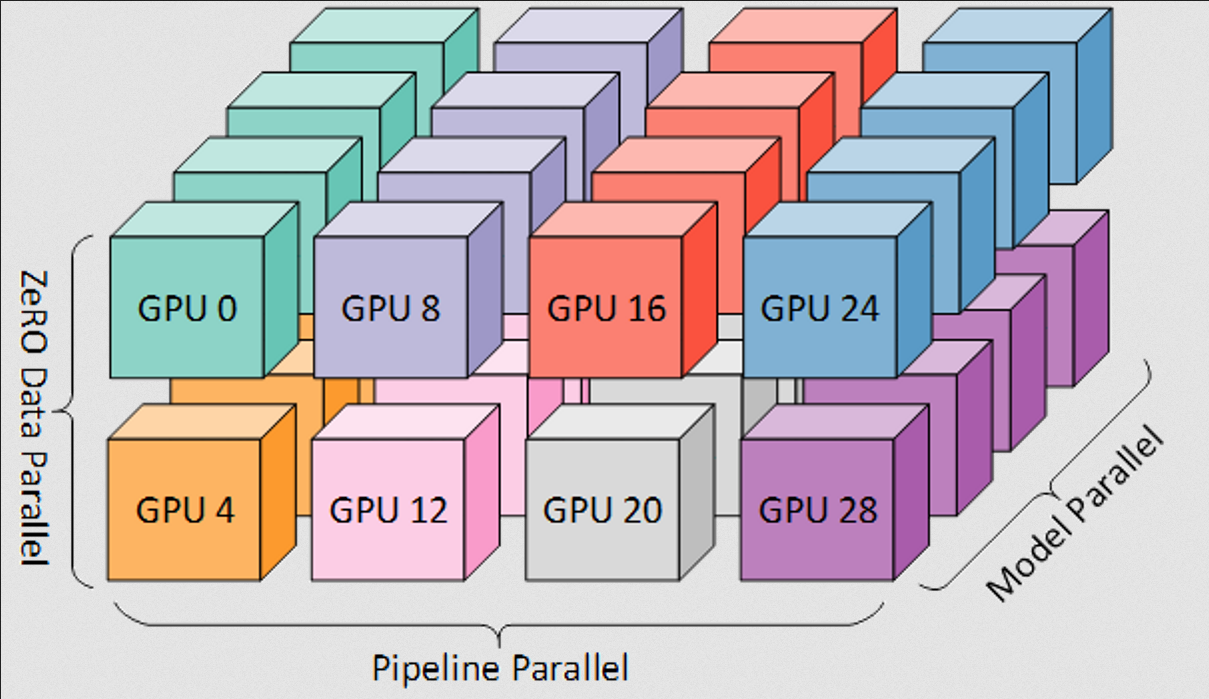
一个重要的补充说明:数据并行度对于计算训练的全局批量大小至关重要。数据并行度取决于完整模型副本的数量:
$$ \text{DP Degree} = \frac{\text{GPU 数量}}{(\text{Pipe-Parallel-Size}) \times (\text{Tensor-Parallel-Size})} $$
流水线并行和张量并行与 ZeRO 的所有阶段都是兼容的。然而,将流水线并行与 ZeRO-2/3 的梯度分片结合时,很难保持效率(因为 ZeRO-2 会对梯度进行分片,而流水线并行会累积梯度。虽然可以通过精心定义流水线调度和重叠通信来维持效率,但这非常困难,以至于 DeepSpeed 目前禁止这样做: 参考。
然而,张量并行与 ZeRO 的各阶段是互补的,因为在每个 rank 上:
- ZeRO-3 从其他 rank 收集完整的层参数,在现在本地的完整层上处理一个完整的输入,然后释放为存储其他 rank 参数而分配的内存。
- 张量并行从其他 rank 收集本地输入的远程激活值,使用本地的层分片处理输入的一个分片,然后将下一层的激活值发送到远程 rank。
在 Eleuther 的大部分工作中,我们使用流水线并行和张量并行以及 ZeRO-1 进行训练。这是因为我们发现 ZeRO-3 在大规模硬件上的通信开销过大,因此我们改用跨节点的流水线并行配合节点内的张量并行。
将所有这些综合起来,对于一个典型的使用激活分区的 3D 并行 ZeRO-1 运行:
Comments