GPU 内存子系统分析(二):DRAM 带宽分析
带宽和吞吐量含义区分
由于 Dissecting the NVIDIA Hopper Architecture through Microbenchmarking and Multiple Level Analysis 和 Dissecting the NVIDIA Blackwell Architecture with Microbenchmarks 两篇论文中对带宽和吞吐量的描述较为混乱,本文统一以 NVIDIA 白皮书中的定义为准。具体总结如下:
首先需要明确 GPU 中 带宽(bandwidth) 和 吞吐量(throughput) 这两个概念的区别:
-
带宽:指单位时间内某个数据通路所能传输的数据量。
在 NVIDIA 白皮书中,带宽通常用于描述 HBM 显存带宽、NVLink / NVLink Switch 带宽等,常见单位为 GB/s、TB/s。 -
吞吐量:指单位时间内 GPU 能够完成的计算操作、指令或任务的数量。
在 NVIDIA 白皮书中,吞吐量常用于描述 FP16 / BF16 / FP8 Tensor Core 吞吐量等,最常见单位为 TFLOP/s、PFLOP/s。对于整数运算,则经常使用 TOPS(tera operations per second)。
不同的缓存操作符
源自 Parallel Thread Execution ISA Version 9.3
表 30:内存加载指令的缓存操作符
| 操作符 | 含义 |
|---|---|
.ca |
各级缓存,很可能再次被访问。 默认的加载指令缓存操作是 ld.ca,它在所有级别(L1 和 L2)分配缓存行,使用正常的驱逐策略。全局数据在 L2 级别是一致的,但多个 L1 缓存对于全局数据并不一致。如果一个线程通过一个 L1 缓存写入全局内存,而第二个线程通过另一个 L1 缓存使用 ld.ca 加载该地址,第二个线程可能会获取到陈旧的 L1 缓存数据,而不是第一个线程写入的数据。驱动程序必须在并行线程的依赖网格之间使全局 L1 缓存行失效。然后,第一个网格程序的存储将被第二个网格程序发出的默认 ld.ca 加载正确地获取到 L1 中。 |
.cg |
全局级别缓存(缓存在 L2 及以下,不在 L1)。 使用 ld.cg 仅在全局缓存加载,绕过 L1 缓存,仅在 L2 缓存中缓存。 |
.cs |
流式缓存,很可能只访问一次。ld.cs 加载缓存流式操作在 L1 和 L2 中分配具有驱逐优先策略的全局行,以限制可能被访问一次或两次的临时流式数据的缓存污染。当 ld.cs 应用于本地窗口地址时,它执行 ld.lu 操作。 |
.lu |
最后一次使用。 编译器/程序员可以在恢复溢出寄存器和弹出函数栈帧时使用 ld.lu,以避免对不再使用的行进行不必要的写回。ld.lu 指令在全局地址上执行加载缓存流式操作(ld.cs)。 |
.cv |
不缓存并重新获取(认为缓存的系统内存行已过时,重新获取)。 应用于全局系统内存地址的 ld.cv 加载操作会使匹配的 L2 行失效(丢弃),并在每次新加载时重新获取该行。 |
表 31:内存存储指令的缓存操作符
| 操作符 | 含义 |
|---|---|
.wb |
缓存写回所有一致级别。 默认的存储指令缓存操作是 st.wb,它将一致缓存级别的缓存行写回,使用正常的驱逐策略。如果一个线程绕过其 L1 缓存存储到全局内存,而稍后另一个 SM 中的第二个线程通过另一个 L1 缓存使用 ld.ca 从该地址加载,第二个线程可能会在陈旧的 L1 缓存数据上命中,而不是获取第一个线程存储的来自 L2 或内存的数据。驱动程序必须在线程数组的依赖网格之间使全局 L1 缓存行失效。然后,第一个网格程序的存储将在 L1 中正确地未命中,并被第二个网格程序发出的默认 ld.ca 加载所获取。 |
.cg |
全局级别缓存(缓存在 L2 及以下,不在 L1)。 使用 st.cg 仅在全局缓存全局存储数据,绕过 L1 缓存,仅在 L2 缓存中缓存。 |
.cs |
流式缓存,很可能只访问一次。st.cs 存储缓存流式操作分配具有驱逐优先策略的缓存行,以限制流式输出数据的缓存污染。 |
.wt |
缓存直写(到系统内存)。 应用于全局系统内存地址的 st.wt 存储直写操作通过 L2 缓存直写。 |
Parallel Thread Execution ISA Version 9.3 在 "9.7.9.1 Cache Operators" 提到 "Cache operators on load or store instructions are treated as performance hints only. The use of a cache operator on an ld or st instruction does not change the memory consistency behavior of the program." 这意味着 GPU 硬件可以不完全遵守这些操作符的语义,它们只是给编译器/硬件的建议。
.cv 操作符进一步分析
这篇 2014 年的帖子,Understanding the functioning of nvprof and .cv data load option ,提到 .cv 只对系统内存(System Memory)有效。
这里的 system memory 指的是 CPU DRAM。所以你不能通过 .cv 让对 GPU device memory 的 global load 直接绕过 L2 去访问 DRAM。
如果 global memory address 实际上映射到 system memory,那么 .cv 的行为是:
- 如果该地址对应的数据已经在 L2 中:
- 如果 dirty,则 flush 回 CPU system memory
- 然后 invalidate
- 之后从 system memory 通过 PCIe 重新读取
综上,.cv 的设计目的主要是为了让 GPU、CPU 或其他 client 对 system memory 有一致视图,而不是为了让 device memory 绕过 L2。
代码和脚本
DRAM 带宽分析
它们均通过 CUDA kernel 测量 GPU global memory / DRAM 路径在不同访问模式下的有效带宽:扫描多种 block/thread 配置,并分别统计 Read、Write、Copy、Mixed 四种操作下的 GB/s 数值。
不同之处在于:一个使用 scalar float 指令,每线程每条指令搬运 4B;另一个使用 vector float4 指令,每线程每条指令搬运 16B。在代码中的区别如下:
// vector float4 .cv load 代码
asm volatile(
"ld.global.cv.v4.f32 {%0, %1, %2, %3}, [%4];"
: "=f"(v.x), "=f"(v.y), "=f"(v.z), "=f"(v.w)
: "l"(ptr)
: "memory"
);
// scalar float .cv load 代码
asm volatile(
"ld.global.cv.f32 %0, [%1];"
: "=f"(v)
: "l"(ptr)
: "memory"
);
代码模式配置
代码均有两个不同的配置参数;
-
kernel或launch -
cg或cs或cv
四种不同的测试基准:
Read: Read-onlyWrite: Write-onlyCopy: Copy 1R1WMixed: Mixed 5R1W
代表每轮迭代 kernel 内部执行的读和写操作次数。
kernel 和 launch 对比
我们以 scalar float 为例。当配置为 kernel 时,代表迭代在 kernel 内部:
// ------------------------------------------------------------
// Mixed 5-read-1-write kernel
// ------------------------------------------------------------
__global__ void dram_mixed_5r1w_kernel(
const float* __restrict__ a0,
const float* __restrict__ a1,
const float* __restrict__ a2,
const float* __restrict__ a3,
const float* __restrict__ a4,
float* __restrict__ dst,
size_t elems,
int iters,
int policy
) {
...
...
for (int it = 0; it < iters; ++it) {
for (size_t i = tid; i < elems; i += stride) {
float v0 = load_policy_float(a0 + i, policy);
float v1 = load_policy_float(a1 + i, policy);
float v2 = load_policy_float(a2 + i, policy);
float v3 = load_policy_float(a3 + i, policy);
float v4 = load_policy_float(a4 + i, policy);
float out = v0 + v1 + v2 + v3 + v4;
store_policy_float(dst + i, out, policy);
}
}
}
...
...当配置为 launch 时,代表迭代在 kernel 外部:
static float time_benchmark(
Launcher launcher,
int warmup_iters,
int measured_iters,
LoopMode mode
) {
...
...
if (mode == LOOP_LAUNCH) {
for (int r = 0; r < measured_iters; ++r) {
launcher(1, r);
}
} else {
launcher(measured_iters, 0);
}
...
...
}warmup_iters 和 measured_iters 限制
对于 launch 模式和 kernel 模式,限制 warmup_iters 为 0,measured_iters 为 10。这样做是为了防止缓存干扰 DRAM 带宽测量 [1]。
kernel 和 launch 选择
在实际的测量中,如果选用 kernel,会带来缓存的干扰。
选择 kernel参数,限制 warmup_iters 为 0,measured_iters 为 10。分别选择 .cs 和 .cg 参数,测量结果如下:
-
cs:
-
cg: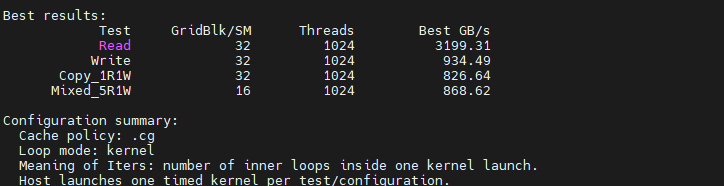
观察发现:
- 在 READ 测试中,无论采用
cs,cg和cv,测得的 DRAM 实际带宽均超出其物理带宽上限,这不合常理,表明存在缓存干扰。 - 此外,
cg测得的带宽显著高于cs,证明cs的“优先逐出”(evict-first)缓存策略确实在生效。
结论:为了避免缓存干扰 DRAM 带宽测量,测量 DRAM 带宽必须 launch。
测量结果
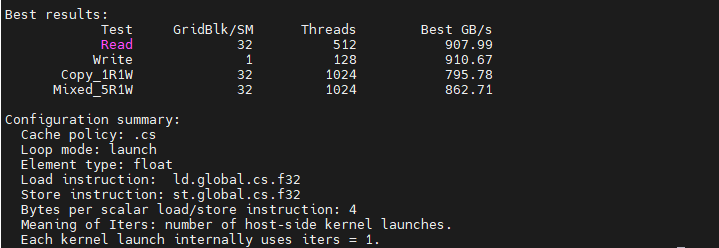
cs + launch 配置下,warmup_iters 为 0,measured_iters 为 10。测得结果:
-
scalar float
-
vector float4
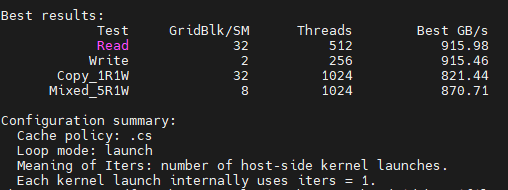
可见,两者的带宽差距都不大。根据 RTX 5080 GPU 架构白皮书,其 DRAM 物理带宽为 960 GB/s。实测带宽已接近该物理带宽,说明此时性能瓶颈主要在于物理带宽限制。
结果分析
分析 scalar float 与 vector float4 在单次搬运数据量相差四倍的情况下,为何 DRAM 实测带宽却依然接近。
首先引出 Little's Laws,然后进行结果分析。
Little's Laws
Little’s Law(利特定律)的形式是
其中:
- $ N $:系统中的平均在途任务数;
- $ \lambda $:吞吐率;
- $ T $:平均停留时间,也就是延迟。
映射到内存系统:
- $ N $:在途内存请求数量,或者在途字节数;
- $ \lambda $:内存吞吐率,也就是带宽;
- $ T $:内存访问延迟。
所以:
也就是:
如果你想达到峰值带宽 $ B $,就必须维持 $ B \cdot L $ 这么多在途数据。$ B \cdot L $ 常称为延迟带宽积[2]。
结果分析
以 READ 最优配置为例:
- 每个 SM 总分配的 block 数 GridBlk/SM = 32
- 每个 block 的线程数 Threads/block = 512
- Best = 907.99 GB/s
GPU 参数:
- 物理带宽 B_peak = 960 GB/s
- SM 数量 = 84
- GPU 频率 = 2947 MHz[3]
- DRAM 访问延迟(相对于 GPU 频率) = 920 cycles
将物理带宽换算成每个 GPU core cycle 的带宽:
也就是说,整个 GPU 想打满 960 GB/s,相当于每个 core cycle 要从 DRAM 返回:
DRAM 延迟:
所以全 GPU 为了打满 960 GB/s,需要的 in-flight 数据量是:
说明,想让 960 GB/s 的 DRAM 管道持续满速流出数据,整个 GPU 至少要让 299690 bytes 的读请求同时处于 in-flight 状态。
SM 数量是 84,所以每个 SM 平均需要贡献:
换句话说,虽然全 GPU 的 DRAM 延迟很高,但是从每个 SM 的角度看,想打满全局带宽,每个 SM 平均只需要维持大约 3568 Bytes 的 DRAM 请求在路上。
对于 scalar float,代码中一个 warp 的一次 load 指令对应的有效数据量为 $32 \times 4 = 128$ bytes(vector float4 则为 $512 \text{ bytes}$)。由于循环内部的访问模式是同一个 warp 的 32 个 lane 访问连续地址,因此可以实现内存合并访问,从而粗略认为:
由于打满 DRAM 带宽要求每个 SM 平均需要贡献 $3568 \text{ byte}$,也就是:
在我的最优配置中,每个 block 的 warp 数:
平均到每个 SM 的 grid warp 数:
注意:这 512 warps/SM 不是同时 resident 的 warps 数量,而是每个 SM 分到的总工作量。真正同时 resident 的 warp 数会受线程数、寄存器、block 上限等限制。满足 28 个 warp-level load 请求/SM轻而易举。
此外,我们找到个 $32\text{ 个 warp-level load 请求/SM}$ 的案例,它的 Read 案例实测带宽也应该接近物理带宽,结果如图:
- scalar float, 配置
cg和launch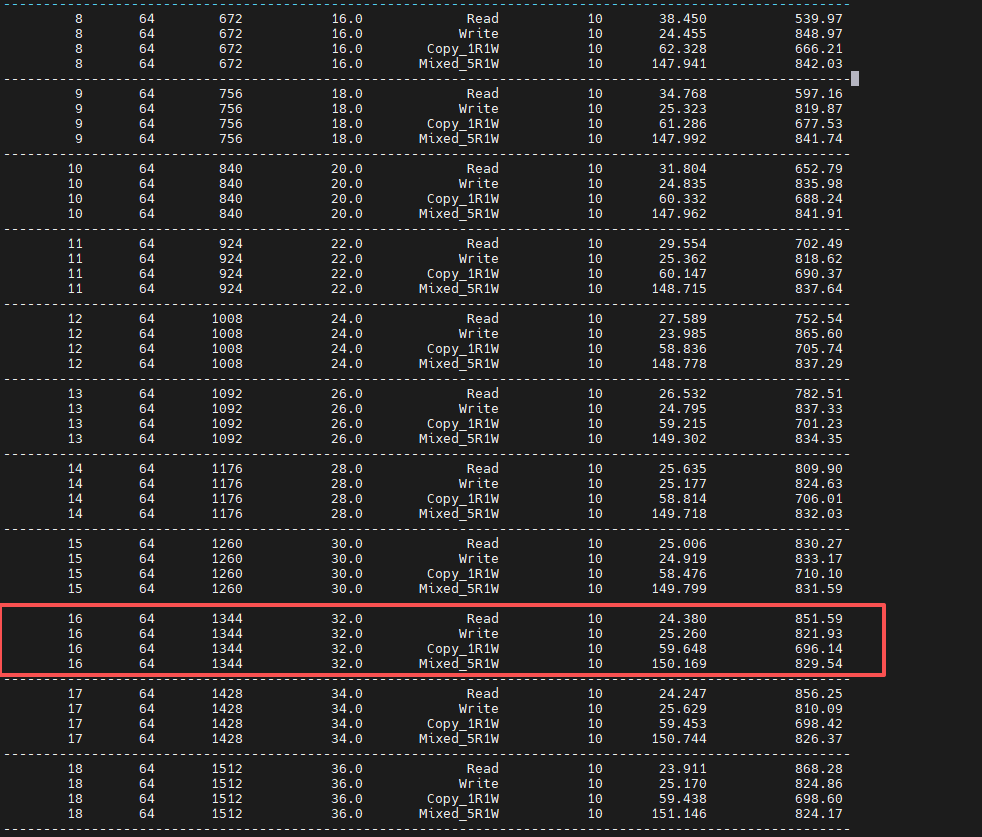
观察到:
Gridblk/SM < 14, Threads = 64时,Read 实测带宽变化幅度比较大。因为此时每个 SM 最多只能分配 16 个 warps,小于打满 DRAM 带宽需要 28 个 warps 的要求。
再次回顾 scalar float 的测量结果:
另一个现象是:单独 READ 和单独 WRITE 的实测带宽最高,Mixed(5R1W)次之,而 Copy(1R1W)相比前三者显著下降。这表明底层读写资源存在共享,读写操作会相互竞争,并引入读写切换等调度开销。
推论
- 白皮书中并未给出 L1 和 L2 的物理带宽数据。不过,若二者的物理带宽足够充裕,vector float4 的实测带宽应达到 scalar float 的 4 倍。若实际倍数远低于此,则表明 vector float4 已触碰到物理带宽上限。
额外的测试
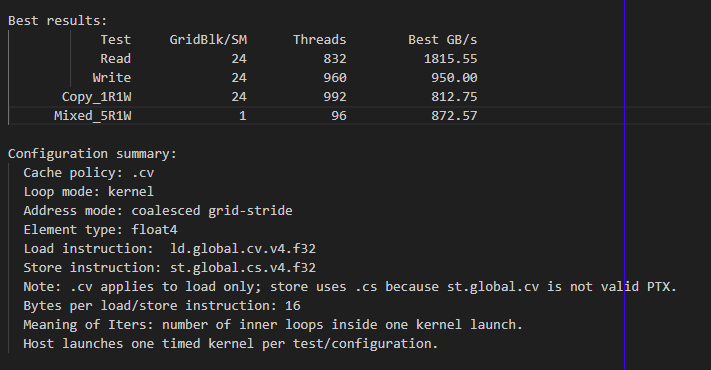
load 有 .cv 缓存操作符,所以额外增加一组测试:
kernel
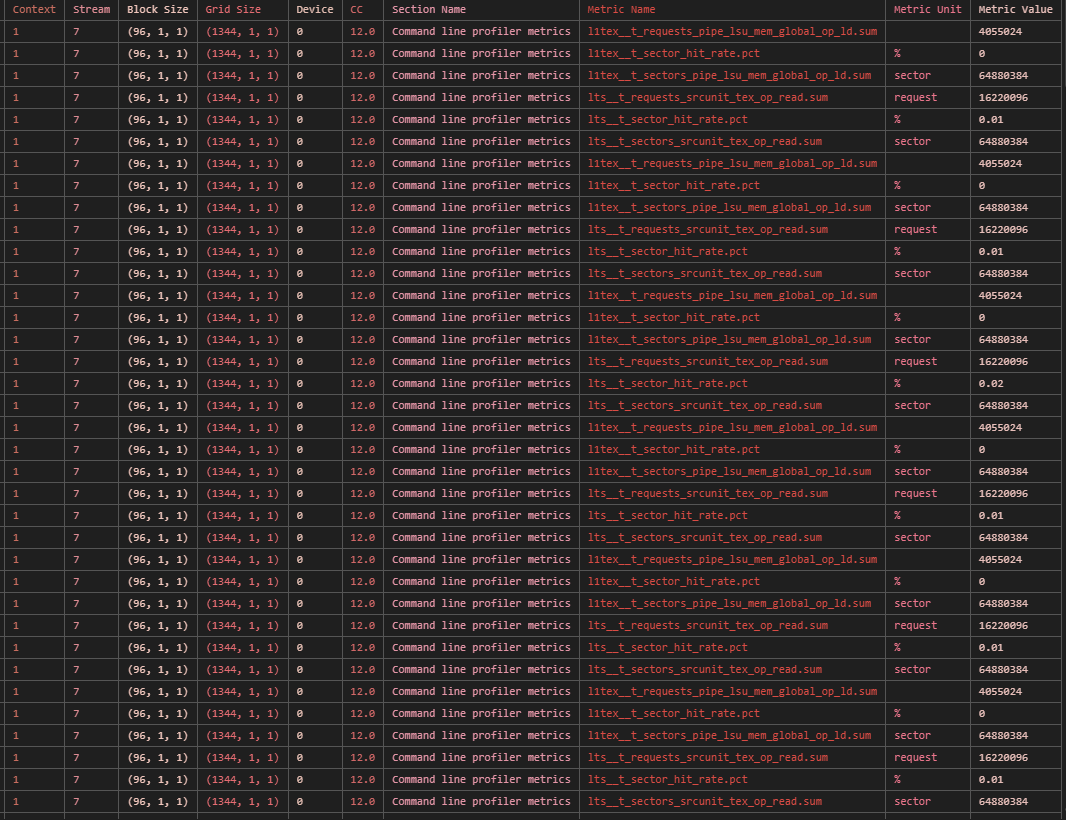
这里展示 kernel + vector float4:
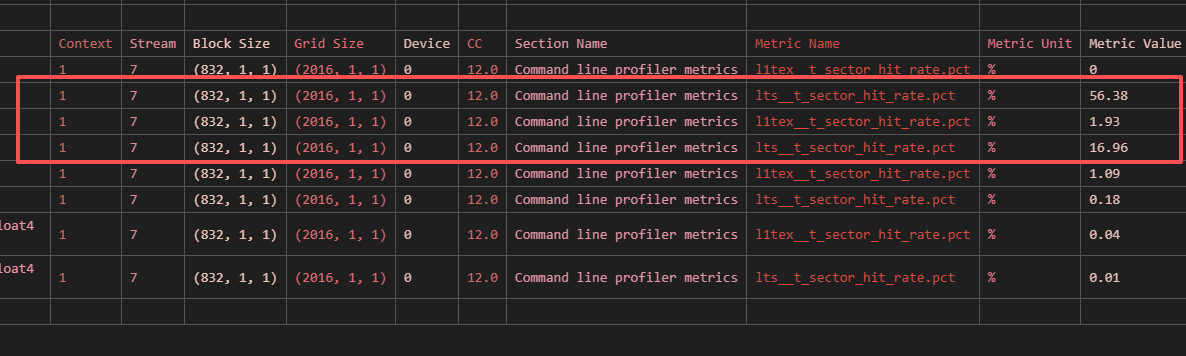
使用以下 ncu 命令分析:
ncu --metrics \
l1tex__t_requests_pipe_lsu_mem_global_op_ld.sum,\
l1tex__t_sectors_pipe_lsu_mem_global_op_ld.sum,\
lts__t_requests_srcunit_tex_op_read.sum,\
lts__t_sectors_srcunit_tex_op_read.sum,\
l1tex__t_sector_hit_rate.pct,\
lts__t_sector_hit_rate.pct \
--csv --log-file "result.csv" \
./bench_l1_cache发现在 kernel 模式下,存在显著的 L2 缓存命中,但暂时仍然未能解决该问题。
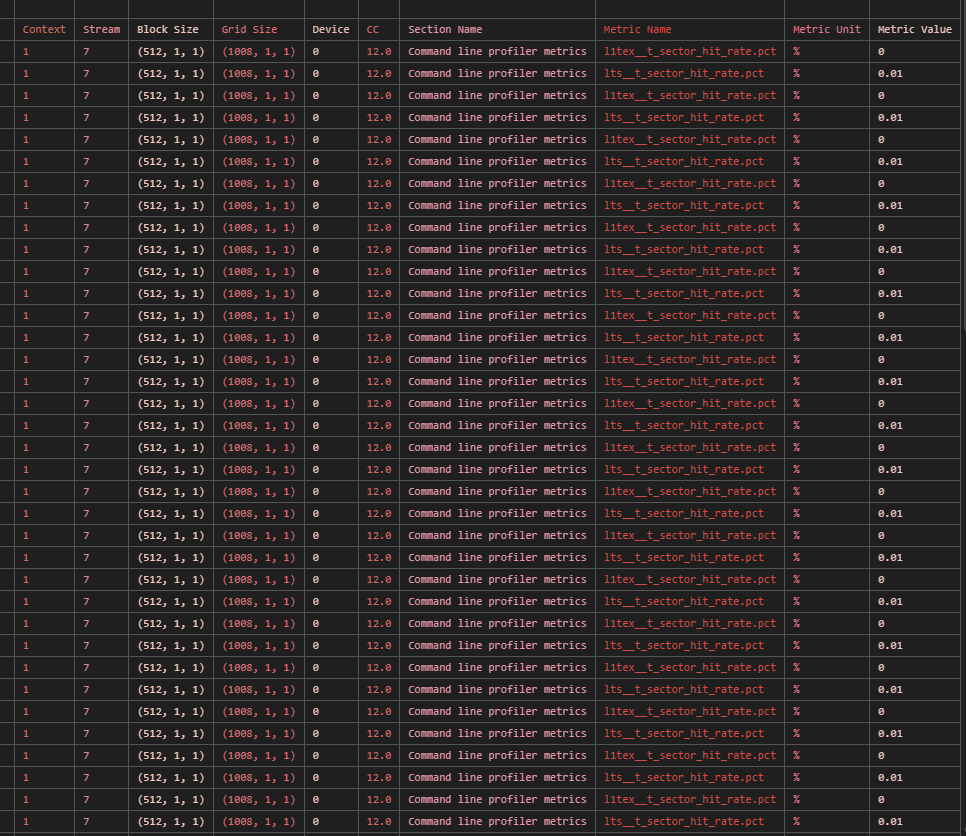
但是如果使用 launch, ncu 分析结果显示 L1 和 L2 缓存命中率几乎为 0。说明测量的正是 DRMA 带宽。
launch
launch + scalar float
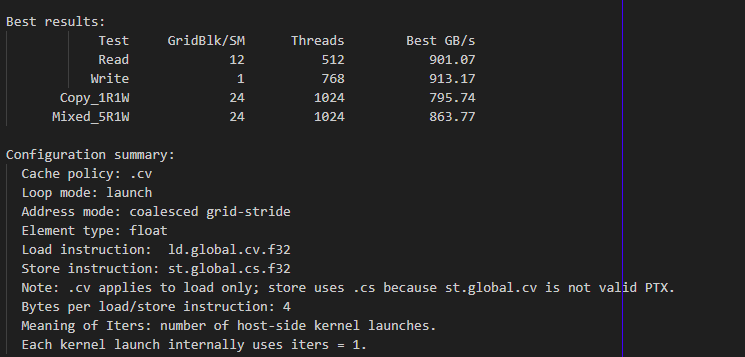
GridBlk/SM: 12; Threads: 512 结果:
launch + vector float4
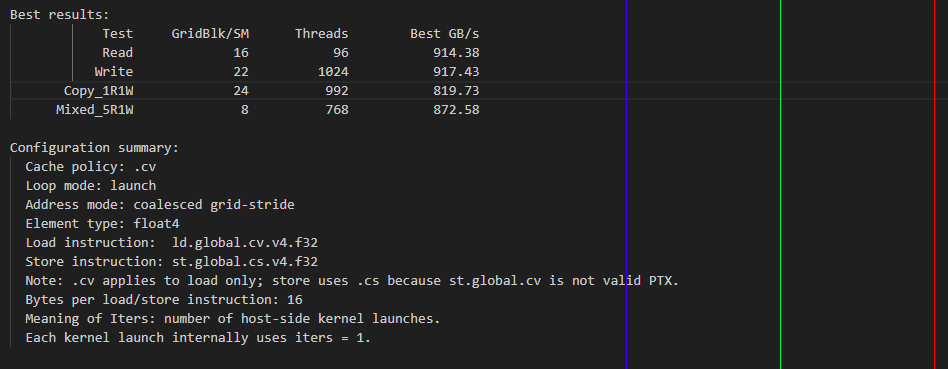
GridBlk/SM: 16; Threads: 96 结果:
可见,launch 模式下几乎没有了缓存命中。所以选用 launch 模式测量 DRAM 带宽是正确的。
评论